





























Rockwell Automation Publication 1560F-UM001A-EN-P - June 2019
203
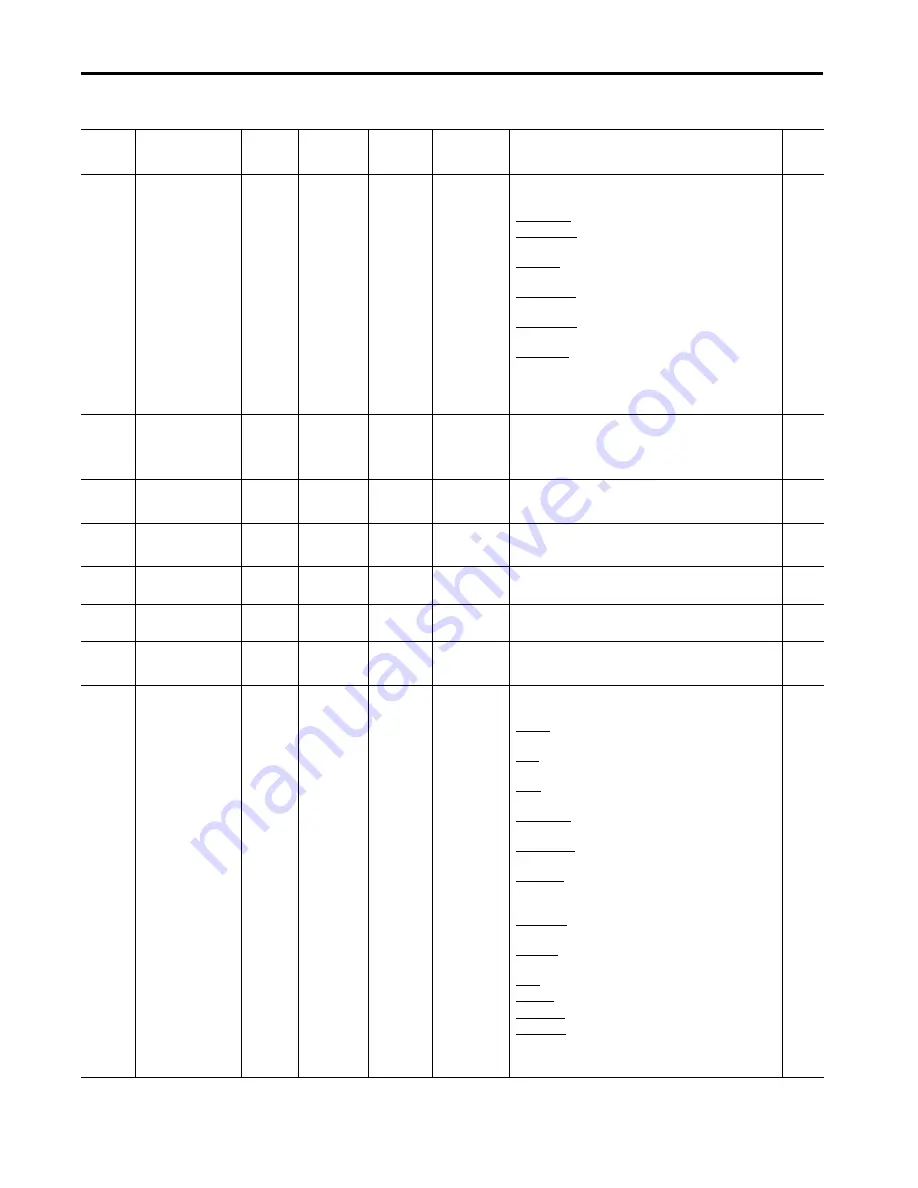
Parameter Information
Appendix A
49
Starting Mode
0/5
2
-Full Voltage
-Current Limit
-[Soft Start]
-
Linear
Speed-
(Sensorless)
-
Torque Ramp
-Pump Start
Used to program the SMC controller for the type of starting
mode that best fits the application.
Full Voltage
: Apply full voltage to the motor at start.
Current Limit
: Apply limited current for a programmed period
of time.
Soft start
: Slowly increase current to load over a programmed
period of time.
Linear Speed
: Increase current to cause a linear acceleration of
the motor.
Torque Ramp
: Slowly increase torque generated by motor over
fixed period of time.
Pump Start
: Special starting algorithm for pump applications.
R/W
50
Ramp Time
Sec
0/1000
10.0
Enables the user the ability to configure the time period during
which the controller will ramp the output voltage.
R/W
51
Initial Torque
%LRT
0/90
70
The initial reduced voltage output level for the voltage ramp is
established and adjusted with this parameter.
R/W
52
Max. Torque
%
0/300
250
Gives the user ability to configure the maximum torque limit of
a torque ramp during a torque start operation.
R/W
53
Cur Limit Level
%FLC
50/600
350
The current limit level that is applied for the ramp time
selected.
R/W
54
Kickstart Time
SEC
0/2
0.0
A boost of current is applied to the motor for this programmed
time.
R/W
55
Kickstart Level
%LRT
0/90
0
Gives the user the ability to adjust the amount of current boost
applied to the motor during the kickstart period.
R/W
56
Input 1
0/14
4
Disable
Start
Coast
Stop Option
[Start/Coast]
Start/Stop
Reserved
Reserved
Dual Ramp
OL Select
Fault
Fault NC
Clear Fault
Emerg Run
Reserved
Allows the user to select the operation of Terminal 11, Input 1
on the control module.
Disable
: Disable the input - ignores any assertion to Input 1,
Terminal 11.
Start
: Initiates a start as set up by the start parameters at Input
1, Terminal 11 (High).
Coast
: Initiates a coast stop.- no current to motor at Input 1,
Terminal 11 (Low).
Stop Option
: Initiates a stop maneuver as set up by the
stopping parameters at Input 1 (Low).
[Start/Coast]
: if Input 1 = 0 - Stops motor; 1- Initiates a start
as set up by the start parameters
Start/Stop
: if Input 1 = 0- Initiates a stop maneuver as set up
by stopping parameters; 1- Initiates a start as set up by the start
parameters
Dual Ramp
: if Input 1 = 0 - Use starting mode 1; 1 - Use
starting mode 2
OL Select
: if Input 1 = 0 - Use Motor Overload Class 1; 1 - Use
Motor Overload Class 2
Fault
: A fault condition forced if Input 1= 1.
Fault NC
: A fault condition forced if Input 1 = 0.
Clear Fault
: Clear a fault from input 1 Terminal 11 (High).
Emerg Run
: Allow motor to run in emergency run mode if
asserted from Input 1, Terminal 11 - does not start motor
(High).
R/W
Table 66 - SMC -50 Parameter List (Continued)
Number
Name
Unit
Min/Max
Default
Enum Text
Description
R/W
Summary of Contents for SMC-50
Page 10: ...10 Rockwell Automation Publication 1560F UM001A EN P June 2019 Table of Contents Notes ...
Page 12: ...12 Rockwell Automation Publication 1560F UM001A EN P June 2019 Preface Notes ...
Page 68: ...68 Rockwell Automation Publication 1560F UM001A EN P June 2019 Chapter 2 Installation Notes ...
Page 120: ...120 Rockwell Automation Publication 1560F UM001A EN P June 2019 Chapter 4 Programming Notes ...
Page 130: ...130 Rockwell Automation Publication 1560F UM001A EN P June 2019 Chapter 5 Metering Notes ...
Page 156: ...156 Rockwell Automation Publication 1560F UM001A EN P June 2019 Chapter 8 Diagnostics Notes ...
Page 198: ...198 Rockwell Automation Publication 1560F UM001A EN P June 2019 Chapter 10 Maintenance Notes ...
Page 284: ...284 Rockwell Automation Publication 1560F UM001A EN P June 2019 Appendix H Spare Parts Notes ...
Page 286: ...286 Rockwell Automation Publication 1560F UM001A EN P June 2019 Appendix I Accessories Notes ...
Page 291: ......







































































