





























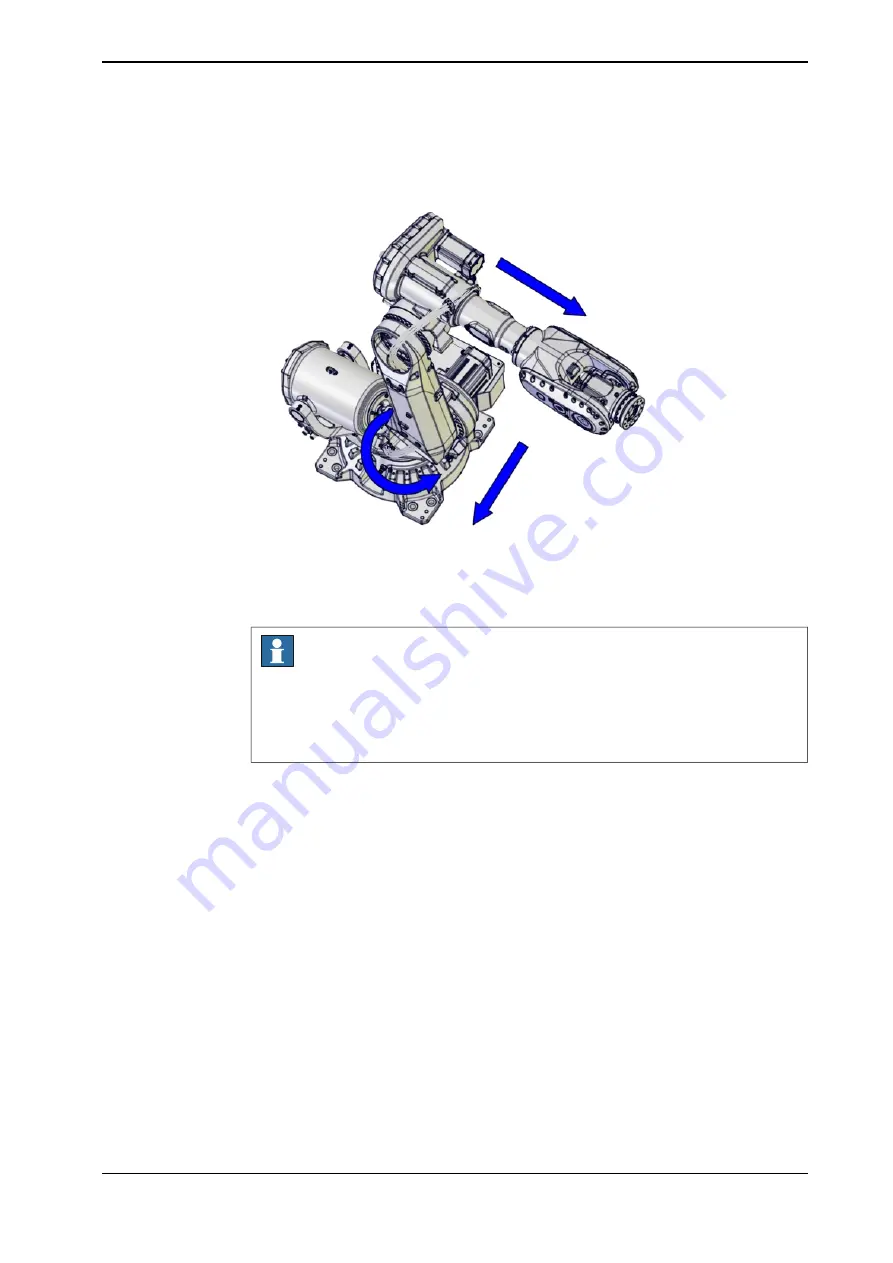
If needed, run axis-1 into a position that gives the required space. The figure shows
an example.
xx1300002304
Example 2: Axis-1 jogged to a position where it is possible to find the required
space in another position of axis-1 than calibration position.
Note
Using this method to replace the gearbox with cable harness and DressPack
fitted, is only a recommendation. If it is not possible to put the arm system close
enough to the robot and keep the cable harness partly fitted, it may by necessary
to remove the cable harness and DressPack in base and frame first.
Continues on next page
Product manual - IRB 6700
665
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.8.3 Replacing the axis-2 gearbox (IRB 6700 - 235/2.65, IRB 6700 - 205/2.80, IRB 6700 - 175/3.05, IRB
6700 - 150/3.20, IRB 6700 - 200/2.60, IRB 6700 - 155/2.85)
Continued
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......







































































