





























Functional Software description
54
DCS 500 Software Description
Field Current Con-
troller
The current controller of the field excitation unit is located inside the
field excitation unit. Some parameters are accessible via serial
communication if the current controller needs manual tuning. The
current controller is a PI-type controller that has parameters for P-
gain and I-time constant.
P-gain parameters:
F1 KP (1308)
F2 KP (1505)
Scaling:
input
4095
P
1
output 4095
I-time constant parameters:
F1 KI (1309)
Scale: 1 = 10 ms
F2 KI (1506)
Scale: 1 = 10 ms
The maximum output voltage of the PI-controller can be limited by
means of two parameters. When the bridge is fully open the output
voltage is 0.9 * VAC. This equals the limit value 4095. The limitation
is linear so 2048 = 0.5 * 0.9 * VAC.
F1 U LIM N (1311)
negative limit
F1 U LIM P (1312)
positive limit
F2 U LIM N (1508)
negative limit
F2 U LIM P (1509)
positive limit
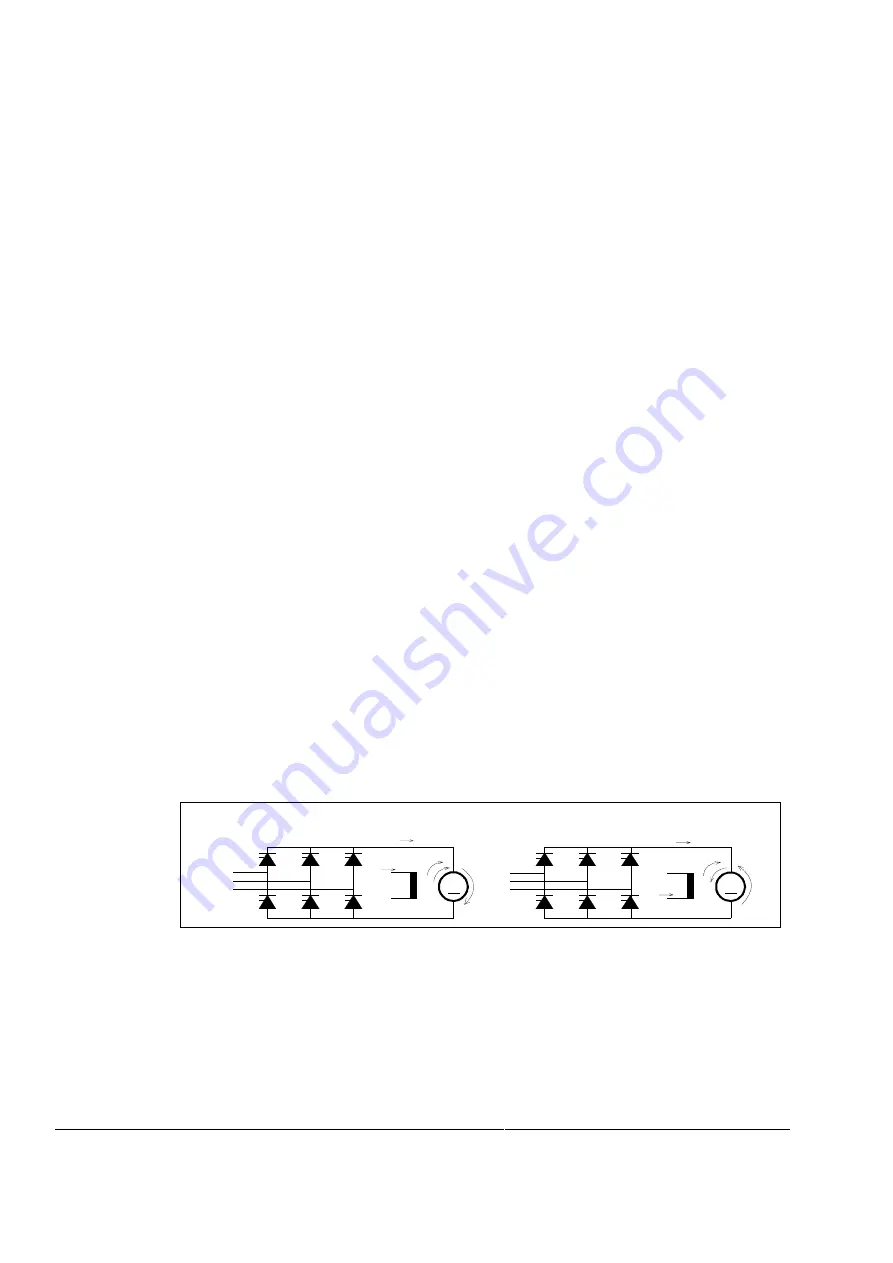
Field Reversal
Field reversal is needed when the drive has only one armature
bridge (two-quadrant). This gives the possibility to change the speed
direction and also to regenerate the energy back to the network. The
sign of the torque reference in armature control defines the direction
of the field.
M
F1
F2
Iexc.
+
-
T
+
-
EMF
n
Id
3 -phase
supply
G
F1
F2
+
-
T
+
-
EMF
n
Id
Iexc.
Normal running as motor
Field Reversal Braking
Figure
41
Field reversal braking principle
Summary of Contents for DCS 500B
Page 8: ......
Page 102: ...Functional Software description 94 DCS 500 Software Description ...
Page 227: ......







































































