





























Manual – MOVI-PLC® Application Solution "SyncCrane"
55
6
Starting the drive
Operation
6
Operation
6.1
Starting the drive
After the download, switch to the monitor of the SyncCrane application module.
6.1.1
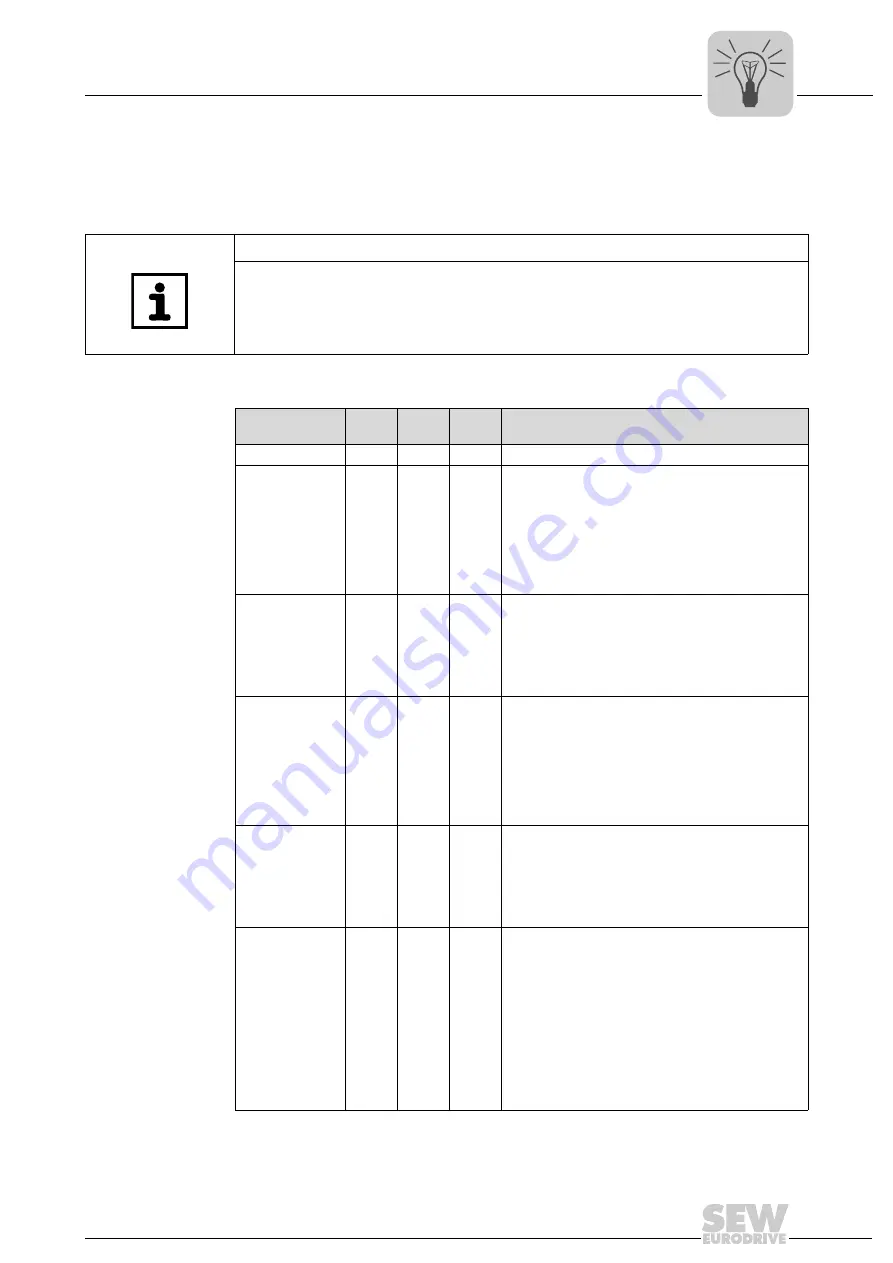
Operating modes for fieldbus control
NOTE
Selection of the modes and plausible feedback of the status bits are only ensured if an
axis number (99 for broadcast, or 1 ... 12 for single axis mode) is transferred via
process data word 3.
Operating mode
PO1:1
3
PO1:1
2
PO1:1
1
Description
Default
0
0
0
No axis is moved.
Jog mode
0
0
1
•
An individual axis or the group can be moved via
the
Jog+
and
Jog–
inputs.
•
The travel parameters
velocity
,
acceleration ramp
and
deceleration ramp
can be specified via process
output data words PD8, PD9, and PD10.
If no velocity is specified, the axis will move at 0.2
rpm.
•
Unsynchronized motion sequence is supported for
controlling single axes or a group of axes.
Referencing mode 0
1
0
•
Motor encoder and absolute encoder position are
referenced when start is set.
•
Reference travel establishes the reference point
(machine zero) for positioning operations.
•
Single axis control is only supported for referencing
to the standstill position.
•
Group control is supported.
Positioning mode
0
1
1
•
After a target position has been specified (PO4,
PO5) and start has been set, the referenced single
axis or group can be moved.
•
The travel parameters
velocity
,
acceleration ramp
and
deceleration ramp
can be specified via process
output data words PD8, PD9, and PD10. If no
velocity is specified, the axis will move at 0.2 rpm.
•
Unsynchronized motion sequence is supported for
controlling single axes or a group of axes.
Automatic mode
(virtual encoder
and synchronous
operation)
1
0
0
•
When start is set, the group is aligned and the
technology function "internal synchronous
operation" is activated.
•
Controlling the virtual encoder lets you move the
axis system (jog mode or positioning mode).
•
For group control, only synchronized motion
sequences are supported.
Emergency mode
1
0
1
•
Emergency mode can be activated by selecting
[ApplicationBuilder] / [ProjectSettings] / [Emergency
Mode]
YES
and restarting the controller.
•
An individual axis or the group can be moved via
the
Jog+
and
Jog–
inputs.
•
The travel parameters
velocity
,
acceleration ramp
and
deceleration ramp
can be specified using
process output date words PD8, PD9, PD10. If no
velocity is specified, the axis will move at 0.2 rpm.
•
Moving the axes without encoder evaluation is
supported.
•
Unsynchronized motion sequence is supported for
controlling single axes or a group of axes.
Содержание MOVI-PLC
Страница 2: ...SEW EURODRIVE Driving the world ...
Страница 105: ......
Страница 106: ......
Страница 107: ...SEW EURODRIVE Driving the world ...