





























76
SANTERNO
USER MANUAL
6.12 VFD Speed Loss Prevention Function
If the speed of the acceleration or deceleration time is too short given by VFD, the output frequency change of
the VFD is far more than the change of the motor speed. VFD will trip because of over current or overvoltage,
stop running, this phenomenon is called speed loss. In order to prevent speed loss and make the motor continue
running, it needs to detect the current and the power cell’s voltage for frequency controlling to restrain acceleration
and deceleration rate.
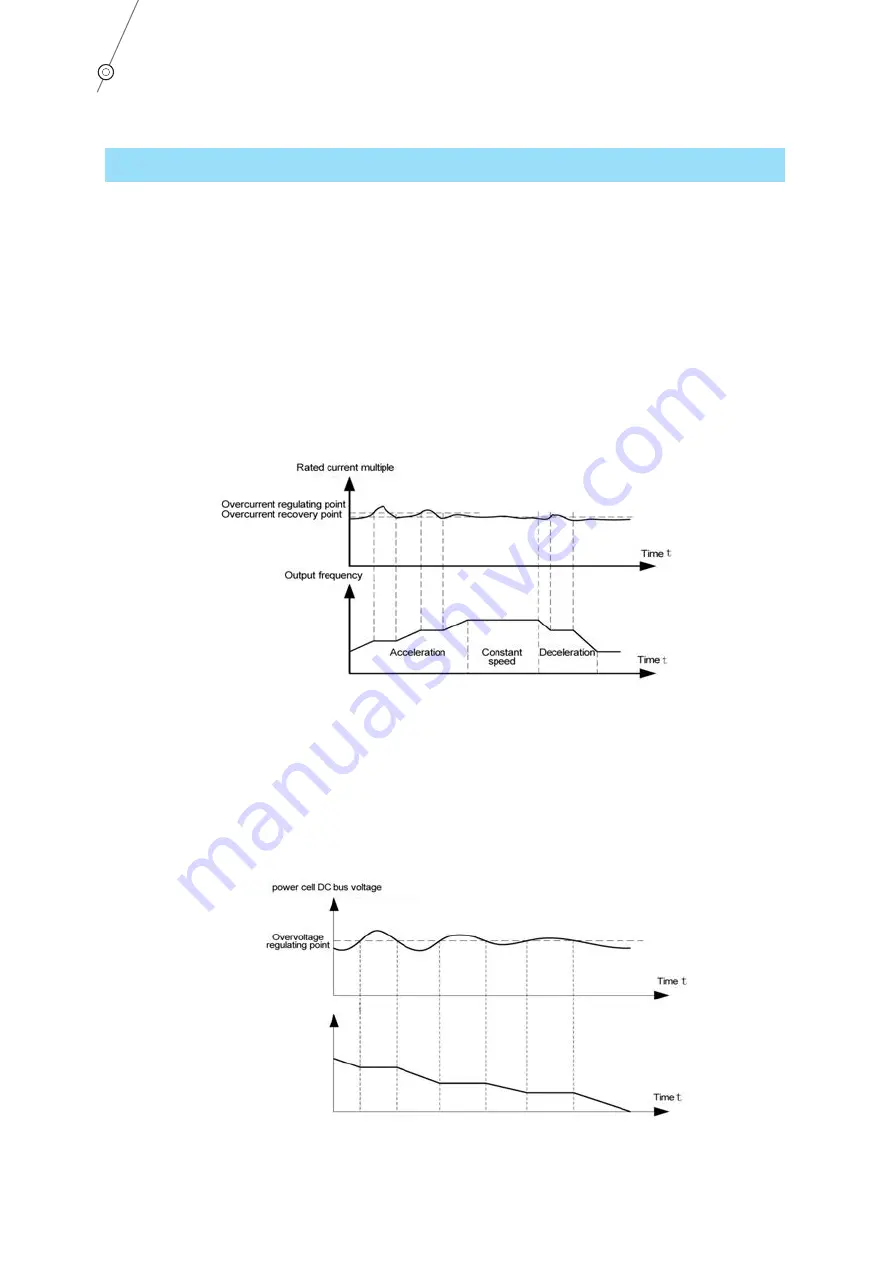
When there is a large current during the acceleration and deceleration of VFD, if the current exceeds the preset
over current adjusting point (i.e. the maximum allowed value of current acceleration), the VFD output frequency
will not change, deferring the acceleration and deceleration. After the current falls below the overcurrent recovery
point, then it will continue to accelerate and decelerate again, shown as the following:
In the deceleration of the VFD, if the load inertia is too large or the deceleration time is too short, it will cause the
rise of the DC bus voltage, and may lead to the overvoltage protection of cell to act. In order to avoid this situation,
the VFD will detect the DC bus voltage of cell in real-time, when it exceeds the adjusting value of cell over-voltage,
stop deceleration, and when the DC bus voltage of cell is lower than the adjusting point of cell over-voltage, then
continue to deceleration running, as shown below.
Figure 6-7 Schematic diagram of over current regulation
Figure 6-8 Schematic diagram of overvoltage regulation







































































