

























Troubleshooting
45
▐
13 Troubleshooting
During motor operation, the motor or driver may fail to function properly due to an improper setting or wiring. When
the motor cannot be operated correctly, refer to the contents provided in this section and take appropriate action. If
the problem persists, contact your nearest Oriental Motor sales office.
This chapter describes problems that may occur during operation in addition to the initial settings.
Refer to the
AZ
Series Function Edition for these contents.
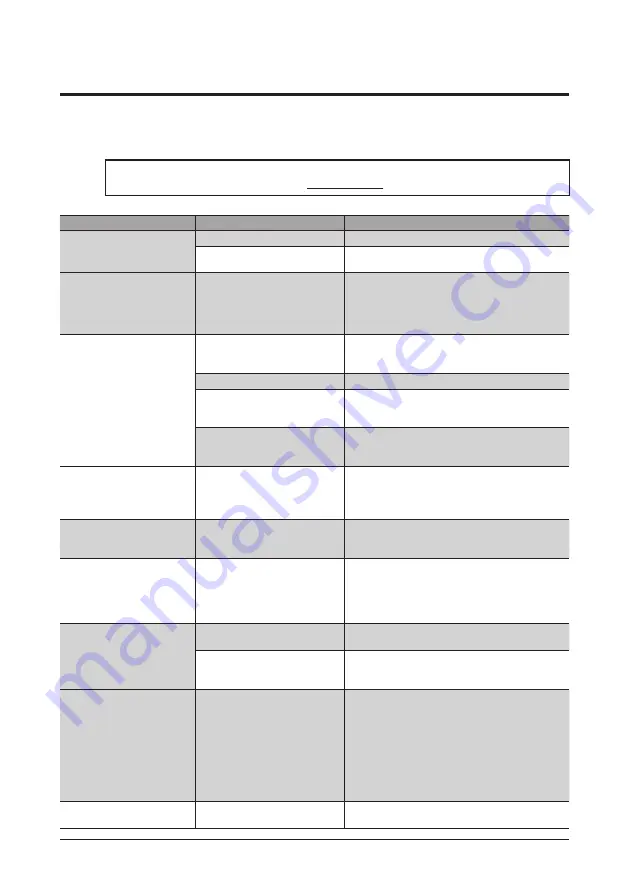
Phenomenon
Possible cause
Remedial action
The motor is not excited.
The motor output shaft can
be moved by hand.
Connection error in the motor.
Check the connections between the driver and motor.
The FREE input is turned ON.
Turn the FREE input OFF.
There is holding torque even if
motor excitation is turned OFF.
Eff ect of dynamic brake.
If motor excitation is turned OFF by C-ON input or
STOP input, the holding torque will be generated
larger than when the power is shut off (dynamic
brake). To release the dynamic brake, shut off the
power or turn the FREE input ON.
The motor does not operate.
An electromagnetic brake motor is
used and the electromagnetic
brake is in the holding state.
Check the connections between electromagnetic
brake and driver.
The STOP input is turned ON.
Turn the STOP input OFF.
The position (distance) is not set in
the operation data while
positioning operation.
Check the operation data.
The FWD-JOG input and RVS-JOG
input are turned ON simultaneously
in the JOG operation.
After turning both the FWD-JOG input and RVS-JOG
input OFF, turn either one of them ON.
The motor does not rotate
although the READY LED is lit.
(only for pulse-input type)
Signals are not connected
properly.
Multiple signals have been input
simultaneously.
Wire signals correctly.
Check if the signal line is disconnected.
Check if the wrong signal is input.
The motor rotates in the
direction opposite to the
specifi ed direction.
The "motor rotation direction"
parameter is set wrong.
Check the setting of the "motor rotation direction"
parameter.
The gear output shaft rotates in
the direction opposite to the
motor.
A gear that rotates in the direction
opposite to the motor shaft is used.
With
TS
geared motor, the gear output shaft rotates
in the direction opposite to the motor when the gear
ratio is 20 or 30.
With Harmonic geared motors, the gear output shaft
always rotates in the direction opposite to the motor.
Motor operation is unstable.
Connection error in the motor or
power supply.
Check the connections between the driver, motor and
power supply.
The base current rate setting is too
low.
Return the CURRENT switch to its initial setting and
check. If the current is too low, the motor torque will
also be too low and operation will be unstable.
Motor vibration is too great.
Load is too small.
Built-in controller type, pulse input type with RS-485
communication interface;
Lower the current using the "Base current"
parameter. Vibration will increase if the motor’s
output torque is too large for the load.
Pulse input type;
Lower the current using the CURRENT switch.
Vibration will increase if the motor’s output torque is
too large for the load.
The electromagnetic brake
does not release.
The power is not supplied to the
electromagnetic brake.
Check the connection of the electromagnetic brake.







































































