





























Explanation of I/O signals
27
▐
8-2 Output
signals
The driver outputs signals in the photocoupler/open-collector output mode or line driver output mode. The signal
state represents the "ON: Carrying current" or "OFF: Not carrying current" state of the internal photocoupler rather
than the voltage level of the signal.
HOME-END output
When the home position is set or when high-speed return-to-home operation is complete, the HOME-END output
turns ON.
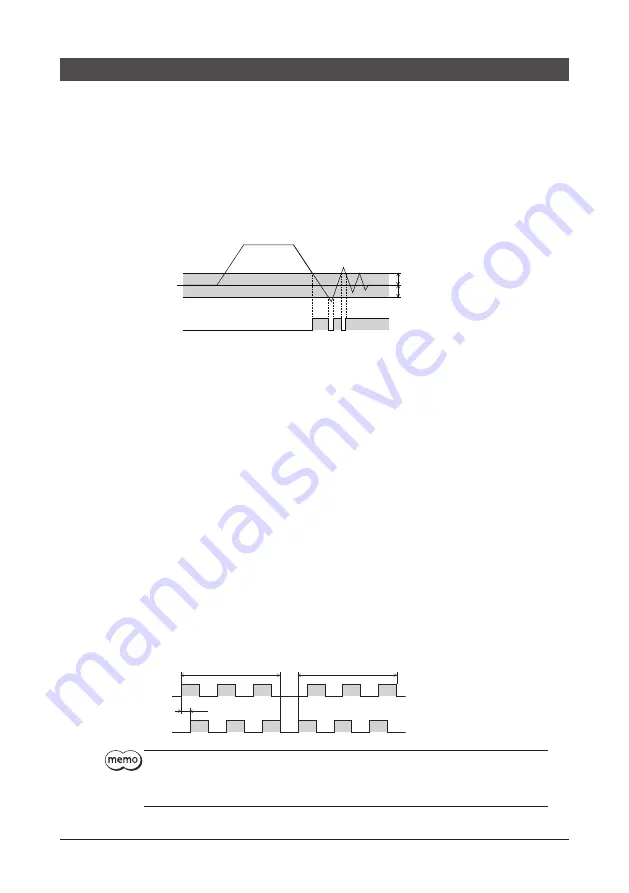
IN-POS output
After completion of positioning operation, when the motor was converged in a position of the “IN-POS positioning
completion signal range” parameter against the command position, the IN-POS output is turned ON.
IN-POS positioning completion
signal range [initial value: 1.8°]
Target position
ON
OFF
IN-POS output
PLS-RDY output
This signal is used when the motor is operated by inputting pulses.
When the driver is ready to execute operation by inputting pulses, the PLS-RDY output turns ON. Input the pulse to
the driver after the PLS-RDY output was turned ON.
READY output
When the driver is ready to execute operation, the READY output turns ON. Input the operation start signal to the
driver after the READY output was turned ON.
MOVE output
The MOVE output turns ON while the motor is operating.
ALM-B output
When an alarm generates, the ALM-B output will turn OFF, and the motor will stop. At the same time, the POWER/
ALARM LED on the driver will blink in red. The ALM-B output is normally closed.
ASG output, BSG output
The ASG output is used to output pulses according to motor operation. The motor position can be monitored by
counting the ASG output pulses. The number of output pulses per motor revolution varies depending on the
resolution eff ective when turning the power on.
The BSG output has a 90° phase diff erence with respect to the ASG output. The motor rotation direction can be
determined by detecting the BSG output level at the rise of the ASG output.
90
°
BSG output
ASG output
CW rotation
CCW rotation
OFF
ON
OFF
ON
The ASG output and BSG output are subject to a maximum delay of 0.1 ms with respect to motor
operation. Use these outputs to check the position at which the motor is stopped.
Connect a termination resistor of 100 Ω or more between the driver and the input of the line
receiver.







































































