





























144
eCobra 600 and 800 Robots with EtherCAT
24402-000 Rev B
0
0.1
0.2
0.3
0
20
40
60
80
100
120
St
opp
in
g
Ti
m
e
(s
)
Speed (%)
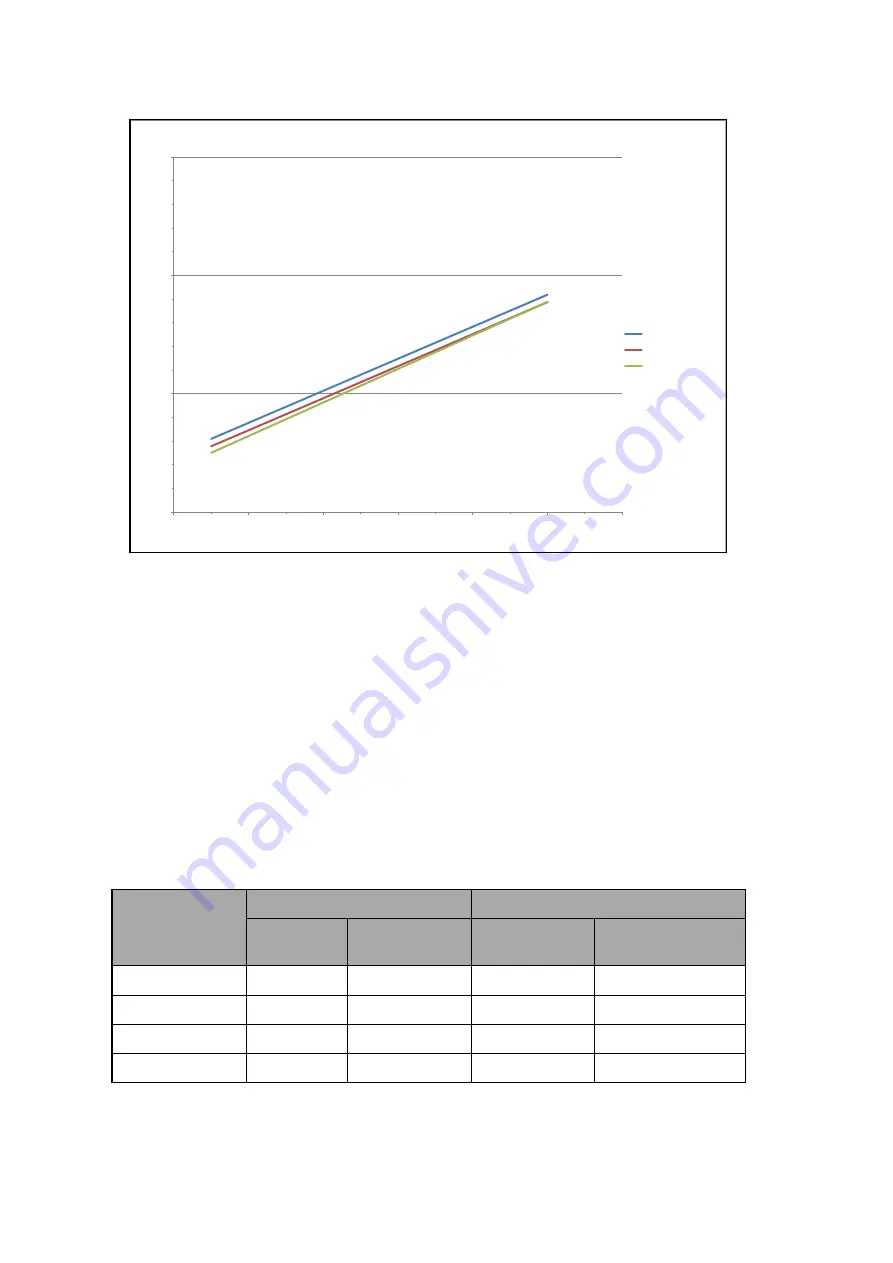
J3 Stopping Time (Cobra800)
Payload 33%
Payload 66%
Payload 100%
Figure 8-19. Stopping Time in Seconds versus Speed (%) for eCobra 800, Joint 3
Stopping distances and times will not significantly degrade as a result of normal use within
the life of the robot. Stopping distance will vary only if there is an actuating mechanism fail-
ure, which may require replacement of the failed component.
If you want to measure stopping distances and time in a real cell with a real robot and with
real tools and loads, contact your local OMRON support.
Hardstop and Softstop Limits
Use the table below to understand the robot hardstop and softstop limits.
NOTE:
The following Joint 1 and Joint 2 hardstop values are only valid without
the optional hardstops installed..
Table 8-3. Softstop and Hardstop Specifications
Joint
eCobra 600
eCobra 800
Softstop
Hardstop –
Approximate
Softstop
Hardstop –
Approximate
Joint 1
±105
±108
±105
±108
Joint 2
±150
±151
±157.5
±160
Joint 3
0 to 210 mm
-5 to 215 mm
0 to 210 mm
-5 to 215 mm
Joint 4
±360
not applicable
±360
not applicable





































































