





























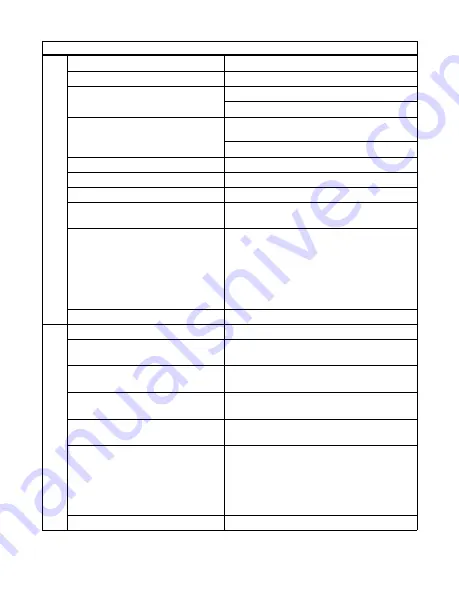
62
Motor coasts to stop after 1 min. at 150% of
drive rated current
Motor coasts to stop if DC bus voltage exceeds
410V (230V drive) or 820V (430V drive)
Motor coasts to stop when DC bus voltage is
below 210V (230V drive) or 420V (460V drive)
Momentary power loss
Undervoltage
Overvoltage
Overload
The following operations are selectable:
• Not provided (stops if power loss is
15 ms or longer)
• Automatic restart at recovery from
0.5 sec. power loss
• Automatic restart
Protected by electronic circuit
Heatsink overheat
Custom V/f pattern
Electronic thermal overload relay
V/f characteristics
Motor overload protection
Motor coasts to stop at approx. 250% of
drive current
Instantaneous overcurrent
Short-term average deceleration torque:
(2)
0.13HP, 0.25HP (0.1kW, 0.2kW): 150%
0.5HP, 1HP (0.4kW, 0.75kW): 100%
2HP (1.5kW): 50% or more
Continuous regenerative torque: approximately 20%
(150% w/ optional braking resistor, braking transistor
built-in)
Braking torque
0.1 to 999 sec (accel/decel times are set
independently)
Accel/decel time
0 to +10VDC (20k
Ω
), 4 to 20mA (250
Ω
) selectable
Frequency reference signal
150% of rated output current for 1 minute
Overload capacity
Control
char
acter
istics
Protectiv
e functions
SECTION B. ALL GPD 205s
0.1Hz
Output frequency resolution
Analog reference: 0.06Hz/60Hz (1/1000)
Digital Operator reference: 0.1Hz (< 100Hz),
1Hz (100Hz or more)
Frequency setting resolution
Analog command: ±1% (77°F ± 18°F, 25°C ± 10°C)
Digital command: ±0.01% (14 to 122°F, –10 to +50°C)
Frequency accuracy (temperature change)
0.5 to 400Hz
Frequency control range
Sine wave PWM w/ full-range automatic torque boost
Control method
for more: efesotomasyon - Yaskawa drive







































































