





























Chapter 8 – Using the digital operator
8-11
Function Display
*
)
Function description / parameter setting range
Standard
setting
Overload restriction
I
motor
b 23
b 23
f
Overload
limit
t
t
Overload limit
characteristic
b 21
N
Three different overload limit characteristics are available that can be
chosen from:
00: Overload limit is not active
01: Overload limit is active in any state of operation
02: Overload limit is not active during acceleration
01
Overload limit
current
b 22
N
The setting range lies between 0.5 times and 1.2 times of the inverter
rated current (i.e. the value is entered with a unit of A).
1,25* in-
verter rated
current
Deceleration time
b 23
N
When the configured overload limit is reached the frequency will be
reduced within the time entered here (setting range: 0.1s/Hz–30s/Hz).
Important note: Do not enter values below 0.3 !
1.0
Function Display
*
)
Function description / parameter setting range
Standard
setting
Software lock mode; magnetizing current
Software lock mode
b 31
N
The following 4 methods of locking entered parameters are available:
00: Software lock initiated by input SFT; all functions locked
01: Software lock initiated by input SFT; function
F 01
still usable
02: Software lock; all functions locked
03: Software lock; function
F 01
still usable
01
Magnetizing
current
b 32
N
This function will be available from July 1998.
(The date on the name plate must read „9807“ or later.)
Magnetizing current can be configured when smaller motors are used
or when driving multiple motors.
0.58 * in-
verter rated
current
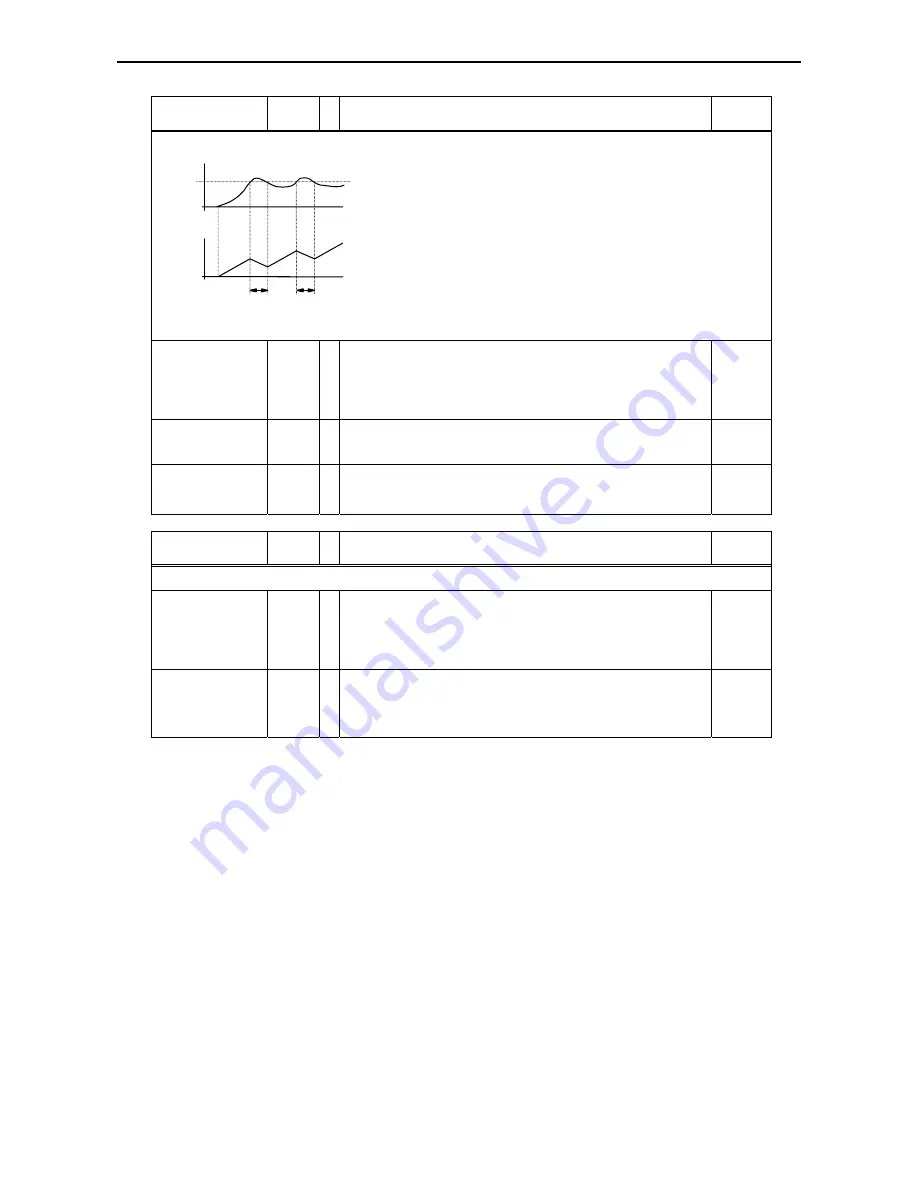
The overload restriction function is used to limit motor current.
During acceleration, the rise in frequency is stopped as soon as the output
current exceeds the configured overload limit. During normal static
operation the output frequency is reduced instead in order to reduce the
load current (the time constant for control near the overload limit can be
entered under
b 23
). When the output current falls below the configured
overload limit, the frequency is raised again to the configured set value.
The overload limit can be deactivated during acceleration (refer to
b 21
)
so that larger currents are allowed for a short time.
It must be noted however, that the overload limit can not prevent an
inverter trip and an inverter shutdown due to a sudden overcurrent
(caused for example by a short circuit condition).
Содержание L100 IP Series
Страница 2: ......
Страница 14: ...Chapter 2 Inspection upon unpacking 2 2 ...
Страница 16: ...Chapter 3 Appearance and names of parts 3 2 ...
Страница 46: ...Chapter 7 Control circuit terminal functions 7 18 ...
Страница 74: ......
Страница 84: ......







































































