





























EP OS MOTOR MANAGEMENT SY STEM – INSTRUCTION
MANUAL
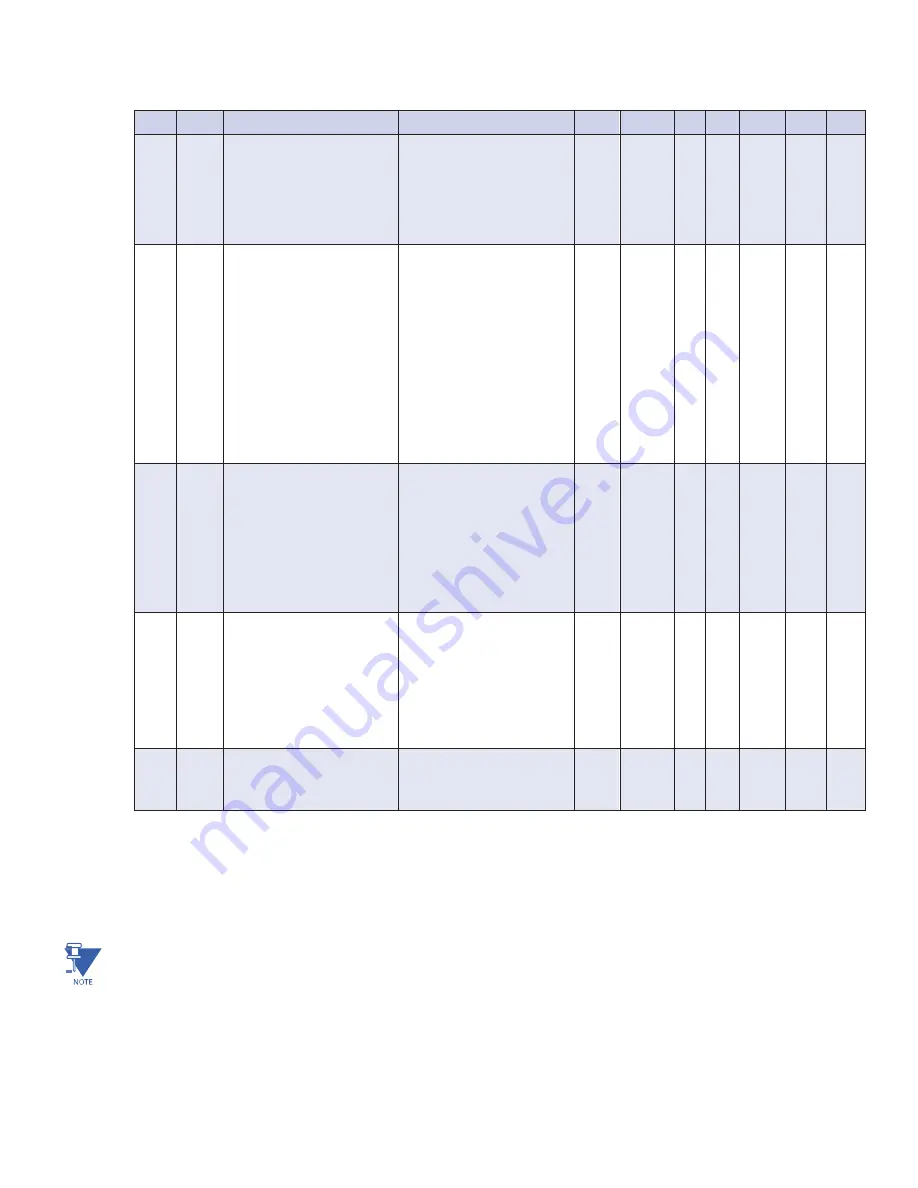
Individual configuration of these registers will not give the expected configuration behavior.
NOTE:
Registers 115, 116 and 117 must be programmable sequentially, in order to get the expected configuration.
4.23
CHAPTER 4: COMMUNICATION
Holding
Register
Modbus
Size
Variable
Description
Min
Max
Step
Units
Scale
Format
Default
113
16 bit
ForceLocalRemote switch
Bit 0: for local switch on Class1 failure.
bit 1 - bit 3: Free
bit 4 - bit 6 : Force local/remote switch to
remote on Modbus Failure
bit 7: Free
Switch setting upon Modbus and/or Profibus
class1 Bus failure
0 = None - Switch remains as is
1 = Local on Profibus Class 1 failure
0 - None
1 - Local on Modbus failure
2 - Remote on Modbus failure
3 - OFF
0
127
1
Unsigned
integer
10
114
16 bit
Protection - Inputs Enable / Disable
bit 0 - Overload
bit 1 - Phase LossL
bit 2 - GF
bit 3 - UnbalancedLoad
bit 4 - Thermistor
bit 5 - EmergencyStop
bit 6 - LimitSwitch
bit 7 - SafetyCircuit
bit 8 - MainCircuit
bit 9 - ControlCircuit
bit10 - SwitchPosition
bit 11 - UnderLoadCurrent
bit 12 - OverloadCurrent
bit 13 - ExternalSupervision
bit 14 - CyclicCommunicationLoss
bit 15 - LongStartTime
0 = Disable
1 = Enabled
Example:
If overload protection on holding register 64
is set to failure and this bit is set to 0, then the
overload failure is ignored.
If overload protection on holding register 64
is set to alarm, and this bit is set to 0, then the
overload alarm is ignored.
If overload protection on holding register 64
is set to failure and this bit is set to 1, then the
overload failure is activated.
If overload protection on holding register 64
is set to alarm, and this bit is set to 1, then the
overload alarm is activated.
This is applicable for the Bit 1 thru Bit 15
0
65535
1
Unsigned
Integer
65471
115
16 bit
Remote Source & Local Remote Switch control
Bit 0 - bit 2
1 - class1
2 - Modbus
3 - Hardwire
Bit 4 - bit 6
1 - class1
2 - Modbus
3 - Hardwire
4 - Fixed Local
5 - Fixed Remote
Bit0 thru Bit2 defines the Remote source
Bit4 thru Bit6 defines the source that controls
the local/remote switch selection.
Note: Fixed local is defined as Hardwire,
Modbus, Profibusand 2
0
127
1
Unsigned
Integer
34
116
16 bit
Bus Command Configuration
bit 0 - Class1 enable/ disable
bit 1 - Class1 n bit 0r (n+1) bit
bit 2 - level/edge
bit 3 - Inverted OFF / Non-Inverted OFF
bit 4 - Class2 Enable/disable
bit 5 - reserved
bit 6 - Modbus Enable/disable
Enables the EntelliPro ES controls (ON/OFF/
Reset...) by different protocols
If Profibus DP Class 1 is enabled then bits 1,2,3
must be set per the required operation
Enables Profibus DP class 2 protocol to control
the motor
Enables Modbus protocol to control the motor.
0
127
1
Unsigned
integer
92
117
16 bit
Hardwire Configuration
Bit 0 - hardwire enable/ disable
bit 1 - hardwire n bit 0r (n+1) bit
bit 2 - hardwire level/edge
Allow EntelliPro ES control via hardware
If Bit 0 is enables (2), bit 1 and 2 must be set
0
5
Unsigned
integer
10244
Содержание EntelliPro ES Series
Страница 2: ...This page was intentionally left blank ...
Страница 8: ...This page was intentionally left blank ...
Страница 182: ...CHAPTER 4 COMMUNICATION EPOS MOTOR MANAGEMENT SYSTEM INSTRUCTION MANUAL 4 45 This page was intentionally left blank ...
Страница 255: ...EPOS MOTOR MANAGEMENT SYSTEM INSTRUCTION MANUAL 6 20 CHAPTER 6 ENTELLIPRO CP3 and CP5 APPLICATION ...







































































