





























388
CHAPTER 20 UART2, UART3
20.7.3
Operation with LIN Function (Operation Mode 3)
UART2, UART3 can be used either as LIN-Master or LIN-Slave. For this LIN function a
special mode is provided. Setting the UART2, UART3 to mode 3 configures the data
format to 8N1-LSB-first format.
■
Operation in Asynchronous LIN Mode (Operation Mode 3)
●
UART2, UART3 as LIN master
In LIN master mode the master determines the baud rate of the whole sub bus, therefore slave devices have
to synchronize to the master. Therefore the desired baud rate remains fixed in master operation after
initialization.
Writing a "1" into the LBR bit of the Extended Communication Control Register (ECCR2/ECCR3)
generates a 13 - 16 bit time low-level on the SOT2/SOT3 pin, which is the LIN synchronization break and
the start of a LIN message. Thereby the TDRE flag of the Serial Status Register (SSR2/SSR3) goes "0". If
valid data does not exist in the transmission data register (TDR2/TDR3), this bit is reset to "1" after the
break, and generates a transmission interrupt for the CPU (if TIE of SSR2/SSR3 is "1").
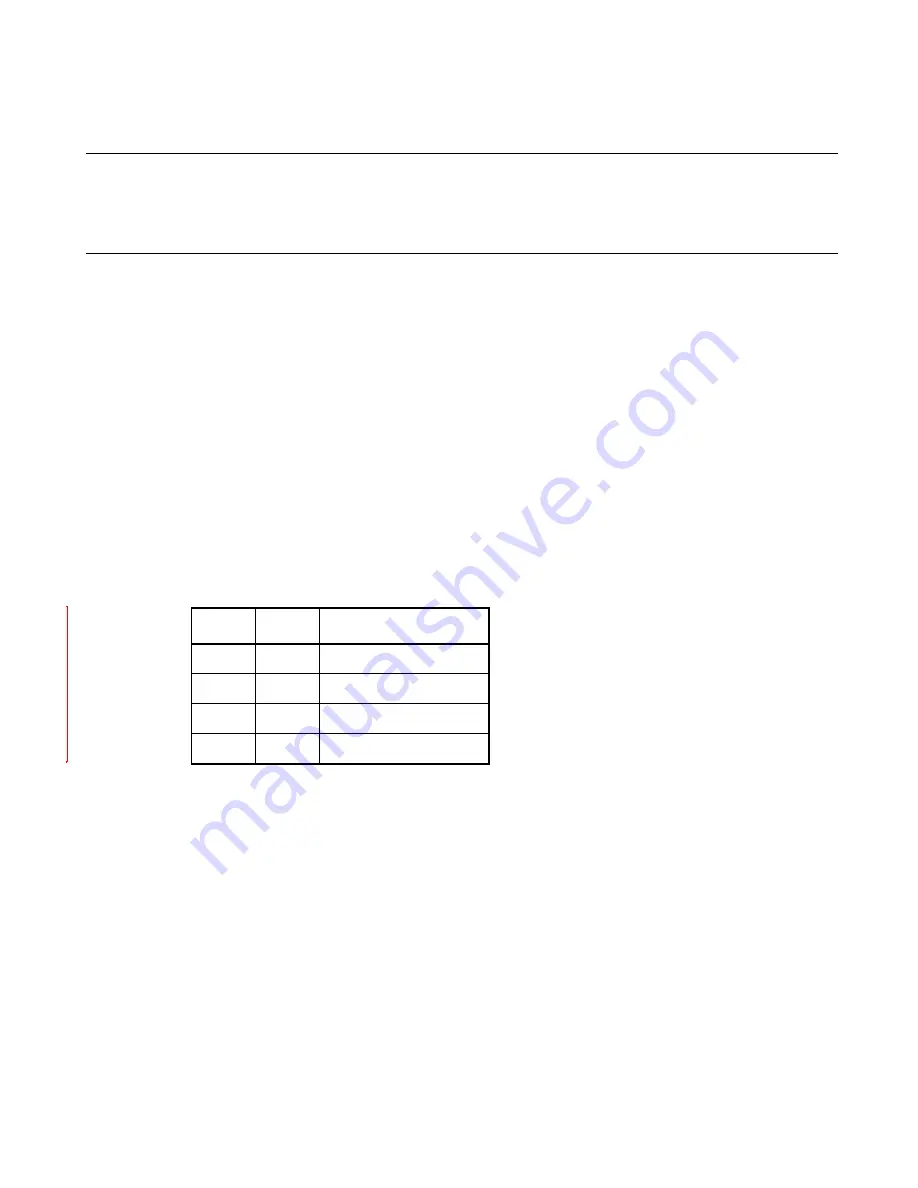
The length of the Synchronization break to be sent can be determined by the LBL1/LBL0 bits of the
ESCR2/ESCR3 as follows:
The Synch Field is sent as byte data of 55
H
after the LIN break. The 55
H
can be written to the TDR2/TDR3
just after writing the "1" to the LBR bit, although the TDRE flag is "0".
Table 20.7-2 LIN Break Length
LBL1
LBL0
Length of Break
0
0
13 Bit times
0
1
14 Bit times
1
0
15 Bit times
1
1
16 Bit times
Содержание MB90390 Series
Страница 2: ......
Страница 4: ......
Страница 17: ...xiii APPENDIX D List of Interrupt Vectors 690 INDEX 695 ...
Страница 18: ...xiv ...
Страница 132: ...104 CHAPTER 5 CLOCKS ...
Страница 152: ...124 CHAPTER 6 CLOCK MODULATOR ...
Страница 210: ...182 CHAPTER 11 TIME BASE TIMER ...
Страница 218: ...190 CHAPTER 12 WATCHDOG TIMER ...
Страница 264: ...236 CHAPTER 14 16 BIT RELOAD TIMER WITH EVENT COUNT FUNCTION ...
Страница 274: ...246 CHAPTER 15 WATCH TIMER ...
Страница 306: ...278 CHAPTER 17 DTP EXTERNAL INTERRUPTS ...
Страница 338: ...310 CHAPTER 18 8 10 BIT A D CONVERTER ...
Страница 364: ...336 CHAPTER 19 UART0 UART1 ...
Страница 398: ...370 CHAPTER 20 UART2 UART3 Figure 20 5 2 ORE Set Timing Receive data RDRF ORE ...
Страница 432: ...404 CHAPTER 20 UART2 UART3 ...
Страница 482: ...454 CHAPTER 22 SERIAL I O ...
Страница 560: ...532 CHAPTER 24 STEPPING MOTOR CONTROLLER ...
Страница 582: ...554 CHAPTER 27 ROM MIRRORING MODULE ...
Страница 632: ...604 CHAPTER 29 EXAMPLES OF SERIAL PROGRAMMING CONNECTION ...
Страница 722: ...694 APPENDIX ...
Страница 723: ...695 INDEX The index follows on the next page This is listed in alphabetic order ...
Страница 740: ......







































































