





























5-47
E2
E30
9
Frequency Arrival Delay Time (for
FAR2
)
Frequency Arrival (Hysteresis width for
FAR
and
FAR2
)
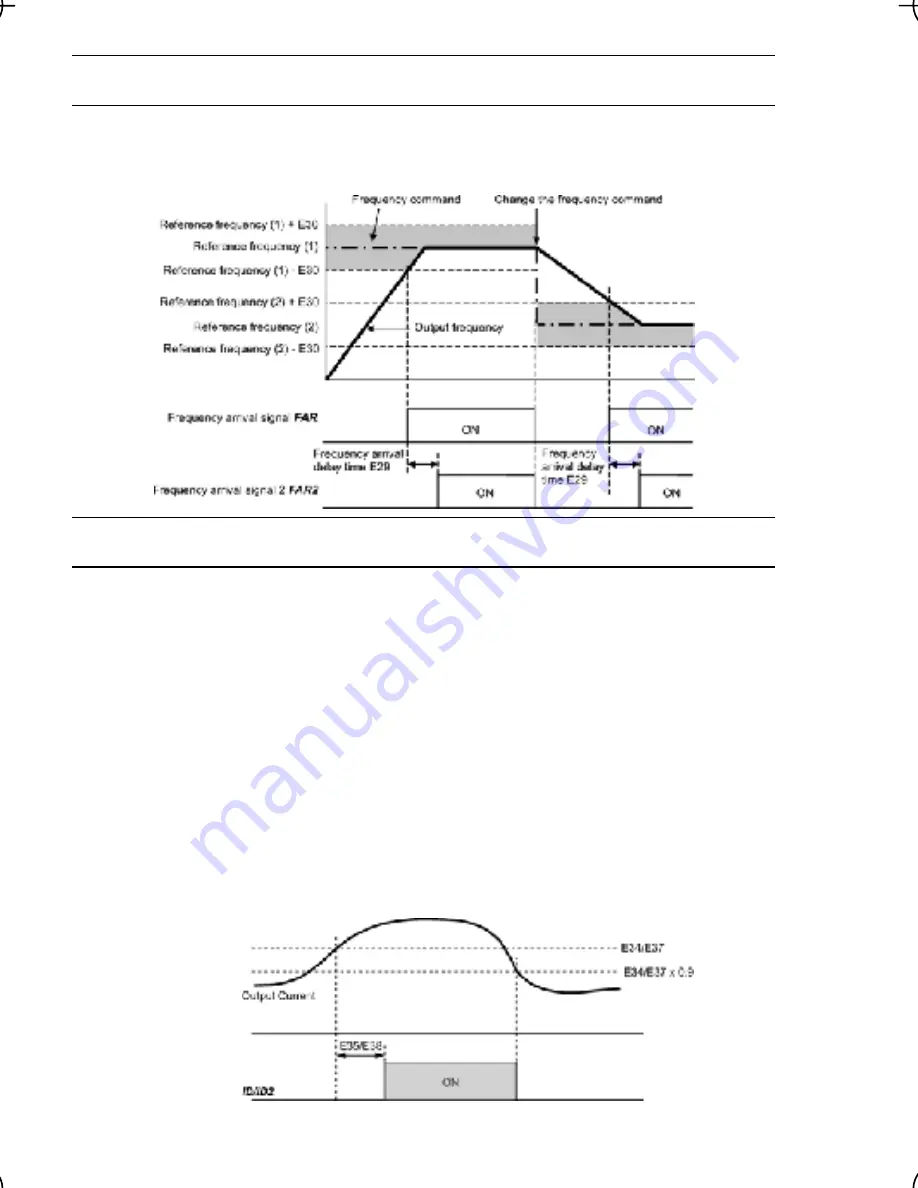
The moment the output frequency reaches the zone defined by "Reference frequency
±
Hysteresis width specified by E30," the "Frequency arrival signal"
FAR
comes ON.
After the delay time specified by E29, the "Frequency arrival signal 2"
FAR2
comes ON.
For details about the operation timings, refer to the graph below.
E34, E35
E3
imer)
7, E38
Overload Early Warning/Current Detection (Level and T
Current Detection 2 (Level and Timer)
These function codes define the detection level and time for the "Motor overload early
warning"
OL
, "Current detected"
ID
, and "Current detected 2"
ID2
output signals.
rent detected 2 signals --
ID
and
ID2
When th
continue
respectiv
ID2
turns OFF
imum width of the output signal: 100 ms)
ID2
(data = 38) to any of digital
Motor overload early warning signal --
OL
The
OL
signal is used to detect a symptom of an overload condition (alarm code
0l1
) of the
motor so that the user can take an appropriate action before the alarm actually happens.
The
OL
signal turns ON when the inverter output current has exceeded the level specified by
E34. In typical cases, set E34 data to 80 to 90% against F11 data (Electronic thermal overload
protection for motor 1, Overload detection level). Specify also the thermal characteristics of
the motor with F10 (Select motor characteristics) and F12 (Thermal time constant). To utilize
this feature, you need to assign
OL
(data = 7) to any of the digital output terminals.
Current detected and Cur
e inverter output current has exceeded the level specified by E34 or E37 and it
s longer than the period specified by E35 or E38, the
ID
or
ID2
signal turns ON,
ely. When the output current drops below 90% of the rated operation level, the
ID
or
. (Min
To utilize this feature, you need to assign
ID
(data = 37) or
output terminals.







































































