





























5-40
Select motor 2 / motor 1 --
M2
/
M1
(Function code data = 12)
ossible
, the digital terminal output
SWM2
(
fault.
M2
/
M1
SWM2
status
after completion of switching
Turning this terminal command ON switches from motor 1 to motor 2. Switching is p
only when the inverter is stopped. Upon completion of switching
"Switched to motor 2"
assigned to any of terminals [Y1], [Y2] and [30A/B/C]) turns ON.
If no
M2/M1
terminal command is assigned, motor 1 is selected by de
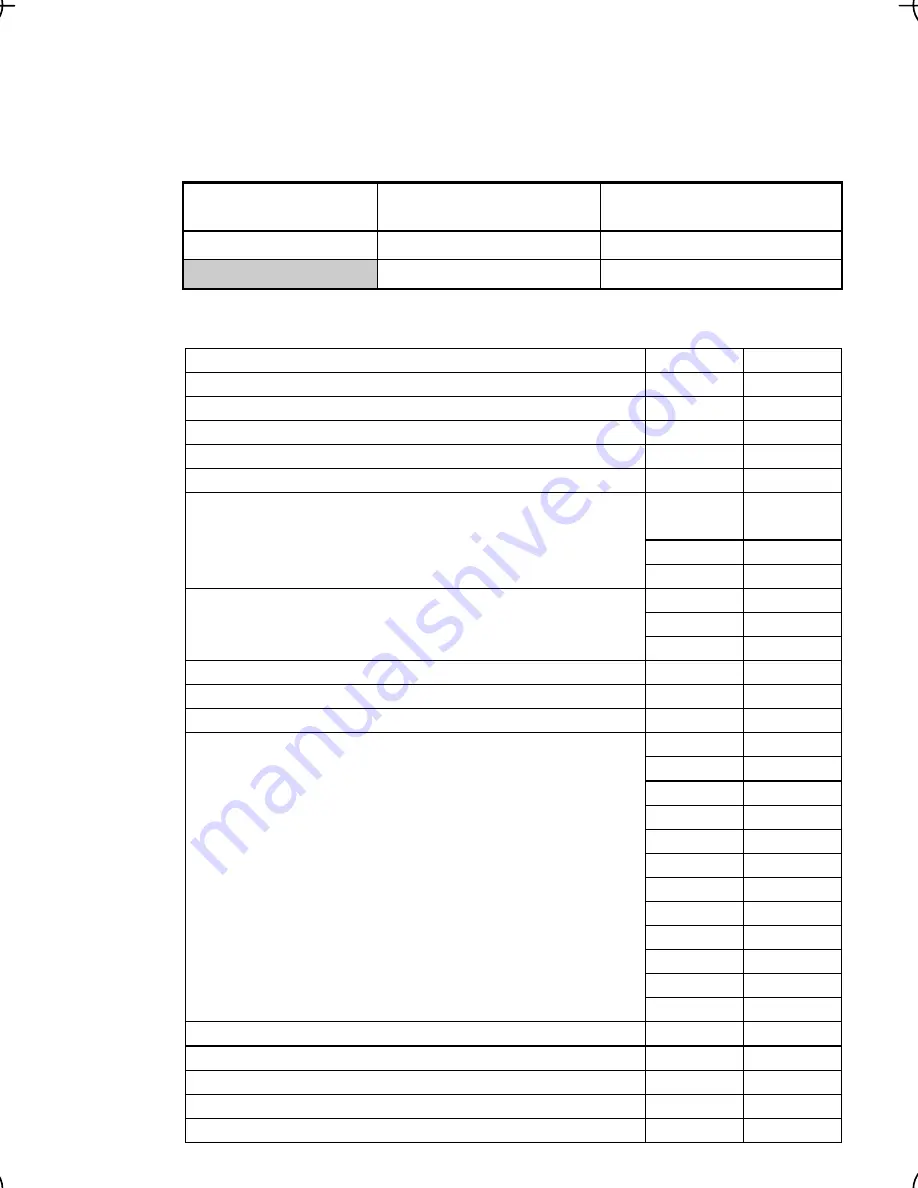
Input terminal command
Selected motor
OFF Motor
1
OFF
ON
Motor 2
ON
Switching between motors 1
ble fu
below. The
runs the
e properly
Function
For M
2
and 2 automatically switches applica
motor with those codes that should b
code name
nction codes as listed
configured.
inverter
otor 1
For Motor
Maximum Frequency
F03
A01
Base Frequency
F04
A02
Rated volt
ency
F05
A03
age at Base Frequ
Maximum Output Voltage
F06
A04
Torque Boost
F09
A05
Electronic T
verload Protection for M
(Select
motor
c
ristics)
F10 A06
hermal O
otor
haracte
(Overload detection level)
F11
A07
(Thermal time constant)
F12
A08
DC Braking
(Braking starting frequency)
F20
A09
(Braking
level)
F21
A10
(Braking
time)
F22
A11
Star ng Frequency
ti
F23
A12
Load Selection/Auto Torque Boost/Auto Energy Saving Operation
F37
A13
Control Mode Selection
F42
A14
Motor
(No. of poles)
P01
A15
P02
A16
(Rated
capacity)
(Rated
current)
P03
A17
(Auto-tuning) P04
A18
(Online
tuning)
P05
A19
(No-load
A20
current)
P06
(%R1)
P07
A21
(%X)
P08
A22
(Slip compensation gain for driving)
P09
A23
(Slip compensation response time)
P10
A24
(Slip compensation gain for braking)
P11
A25
(Rated slip frequency)
P12
A26
Motor Selection
P99
A39
Slip Com
(Operating conditions)
A40
pensation
H68
Output Cu
luctuation Damping Gain fo
A41
rrent F
r Motor
H80
Cumulative
r Run Time
A45
Moto
H94
Startup Times of Motor
H44
A46





















































