


























8049#
)XQFWLRQ
#
%ORFNV
953#
9HFWRU
#
'ULYH
#0#
+$
7968;7
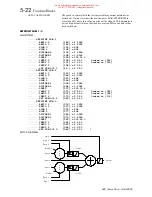
..........NEG TORQUE LIMIT [158] = -150.00 %
..........MAIN TORQUE LIM. [159] = 100.00 %
..........SYMMETRIC TQ.LIM. [153] = TRUE
..........ACTUAL POS I LIM [13] = 31.44 %
..........ACTUAL NEG I LIM [14] = -31.44 %
..........CURRENT LIMIT [585] = 150.00 %
..........AT CURRENT LIMIT [16] = FALSE
........CURRENT FEEDBACK [78] = 0.00 %
f.......TERMINAL VOLTS [480] = 0 VOLTS
f.......DC LINK VOLTS [613] = 594 VOLTS
h.......DC VOLTS UNFLT [684] = 594 VOLTS
........TORQUE DEMAND [9] = 0.00 %
........TORQUE FEEDBACK [10] = 0.00 %
3$5$0(7(56
MAG CURRENT % [453]
set by Autotune
ROTOR TIME CONST [458] set by Autotune
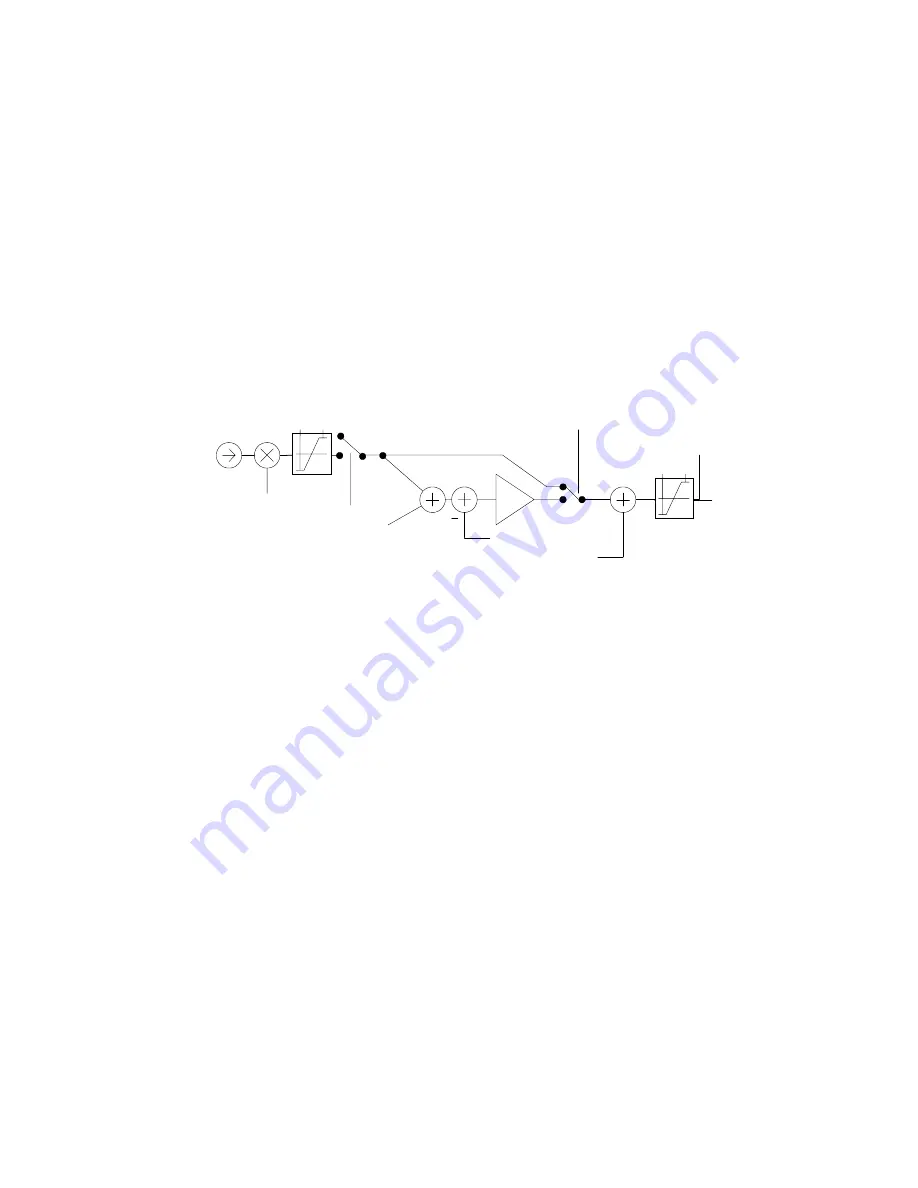
',5(&7
#
72548(
#
&21752/
T o r q u e D e m a n d
A U X T O R Q U E D M D
T O R Q . D M D . I S O L A T E
D I R E C T R A T I O
D I R E C T S P T . P O S
D I R E C T S P T . N E G
C 4
Analog I/P 2
D I R E C T E N A B L E
Figure 5.13 Speed Loop
TORQ.DMD.ISOLATE
Bypasses the speed loop.
NOTE: This mode is over-ridden while the drive is stopping, and during autotune.
AUX TORQUE DMD
Additional torque demand.
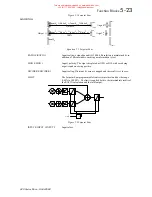
$'9$1&('
1 / GAIN [149]
Current loop gain is not a critical parameter and it should not normally be necessary
to change it from the factory default value provided the motor is a standard type
whose rating is reasonably close to the rating of the drive. See Appendix A, "Current
Loop Gain".
ROTOR TEMP
Rotor temperature input, this value is used to calculate a rotor time constant
compensation value. The value of rotor temperature must either be calculated
externally of measured directly using an analogue input.
Tr COMP (COLD)
Sets the range of the rotor time constant compensation value, from cold to hot. Cold
in this context is ROTOR TEMP = 0%
Tr COMP [784]
Diagnostic.
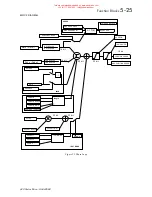
72548(
#
/,0,76
These limits the torque to the motor, not the current. The Current to the motor is made up of two component a Torque
producing component, Iq and a "Field" producing component. The vector sum of these to is motor current.
533#(#
72548(
#
/,0,76
Although the limits have the range
±
200% this is only of use if the stack is capable of providing the extra current
required. Stacks are rated for 150% current as standard, the current is clamped to 150% of stack RMS current by the Ixt
function block.
POS TORQUE LIMIT
Positive Torque Limit see over page.
NEG TORQUE LIMIT
Negative Torque Limit see over page.
MAIN TORQUE LIMIT
Main Torque Limit see over page.
SYMMETRIC TQ.LIMIT
Selects whether the negative limit is used or not.
This manual was downloaded on www.sdsdrives.com
+44 (0)117 938 1800 - [email protected]







































































