





























83
7.4.12
Collaborative Work Space Setting
To configure the collaborative work space, tap the
Add button on the
Robot
Workcell and select
Collaborative Work Space>Collaborative Work Space
. The Safety Password is required during
setup.
1
Separate the space into one or two planes consisting of X and Y axis coordinate information.
2
Place the robot TCP on a point on the first line to designate.
3
Tap the
Save Pose
button of the
Point 1
item of
Plane 1
.
4
Place the robot TCP on another point on the first line.
5
Tap the
Save Pose
button of
Point 2
.
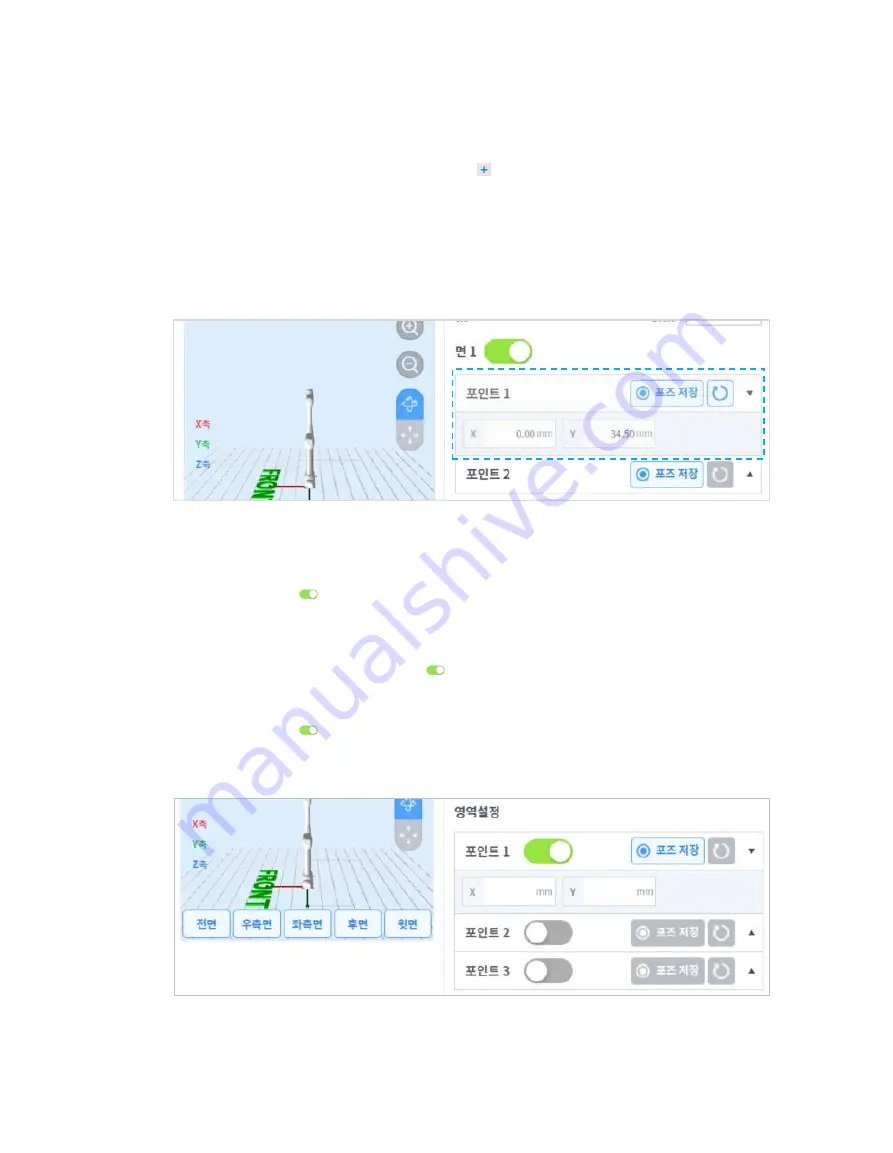
6
Tap the toggle (
) button of
Plane 1
to enable plane 1.
7
A plane composed of the first straight line appears in the simulator.
To configure the second plane, enter the positions of
Point 1
and
Point 2
of
Plane 2
.
When entered, tap the toggle (
) button to enable Plane 2.
8
Tap the toggle (
) button of
Point 1
of area setting.
9
In the space consisting of planes, place the robot’s TCP in the area to be configured as the
collaborative work space.
10
Tap the
Save Pose
button of
Area Setting
Point 1
to enter the position value.
Содержание M0609
Страница 1: ...Manual Version 1 9 Software Version 2 5 ...
Страница 21: ...21 For information about additional modules refer to corresponding manuals ...
Страница 59: ...59 Tapping the Edit button cannot edit the setting but deletion is possible ...
Страница 61: ...61 No Item Description 9 Delete Deletes the current Workcell 10 Confirm Saves the Workcell settings ...
Страница 75: ...75 A Series does not feature Auto Calculate for weight ...
Страница 97: ...97 Note The configuring end effector and base end effector must be symmetrical on the tool Z axis ...
Страница 133: ...133 4 The Save As popup window appears Enter the task name in the popup window and tap the Confirm button ...
Страница 139: ...139 9 5 Execute Task Program The execution of task programs in Task Writer is identical to that of Task Builder ...
Страница 166: ...Doosan Robotics User Manual v1 9 166 ...
Страница 190: ...Doosan Robotics User Manual v1 9 190 ...