





























Doosan Robotics User Manual v1.9
80
Item
Description
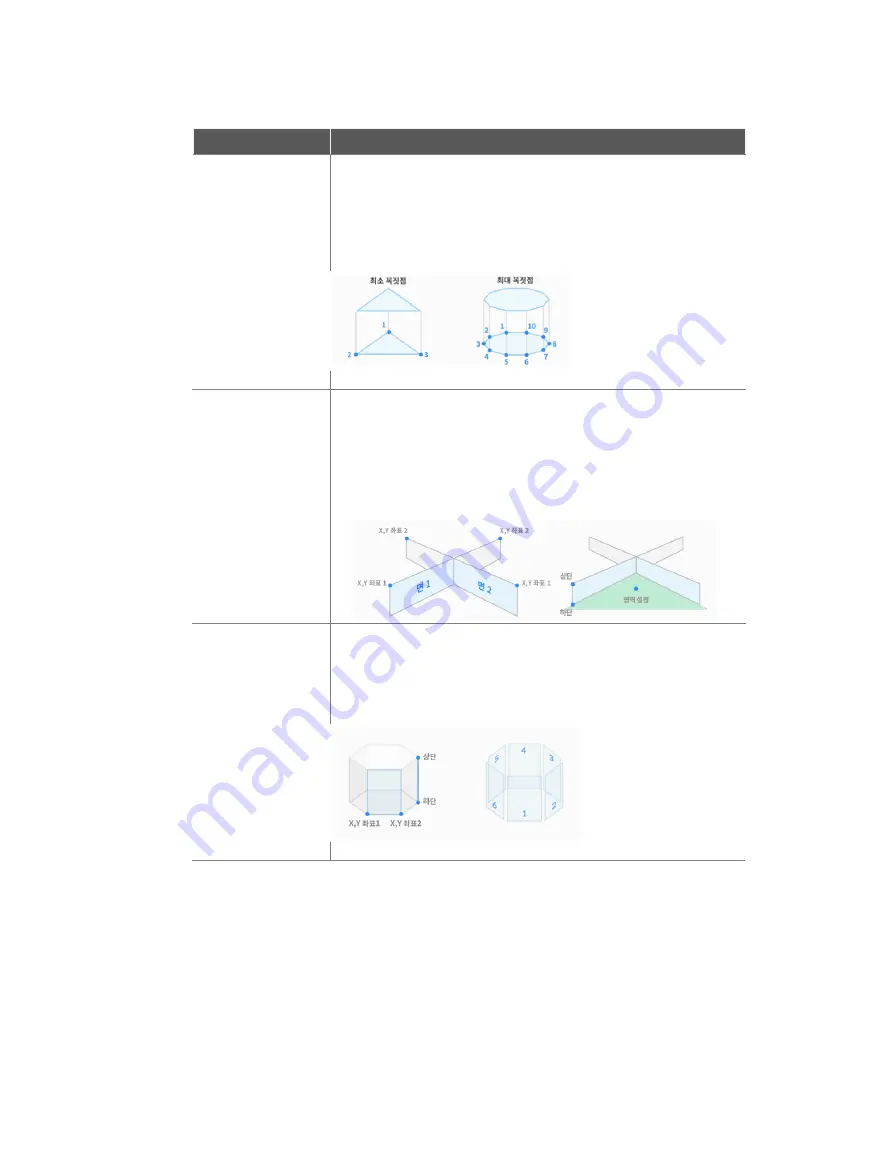
Multi-angular
Prism
(
삭제
예정
)
The robot operation environment is set as a multi-angular prism
shape.
Enter the point of the upper plane and point of the lower plane of
the multi-angular prism, and tap the
Save Pose
button.
Enter points of the lower plane (min. three points / max. 10
points) and tap the
Save Pose
button.
Multi-plane Box
The robot operation environment is set as a multi-plane box
shape.
Set the height of the top and bottom of the multi-plane box and
press the
Add Pose
button to add a plane.
Select X and Y coordinates to set the direction of the plane and
tap the
Save Pose
button. Up to six planes can be configured.
Set the coordinates of the point of the area to configure.
Polyhedron
(
삭제
예정
)
The robot operation environment is set as a polyhedron shape.
Select X and Y coordinates to set the direction of the plane and
tap the
Save Pose
button. Up to six planes can be configured.
Enter the lower endpoint and upper endpoint of the polyhedron
and tap the
Save Pose
button.
Содержание M0609
Страница 1: ...Manual Version 1 9 Software Version 2 5 ...
Страница 21: ...21 For information about additional modules refer to corresponding manuals ...
Страница 59: ...59 Tapping the Edit button cannot edit the setting but deletion is possible ...
Страница 61: ...61 No Item Description 9 Delete Deletes the current Workcell 10 Confirm Saves the Workcell settings ...
Страница 75: ...75 A Series does not feature Auto Calculate for weight ...
Страница 97: ...97 Note The configuring end effector and base end effector must be symmetrical on the tool Z axis ...
Страница 133: ...133 4 The Save As popup window appears Enter the task name in the popup window and tap the Confirm button ...
Страница 139: ...139 9 5 Execute Task Program The execution of task programs in Task Writer is identical to that of Task Builder ...
Страница 166: ...Doosan Robotics User Manual v1 9 166 ...
Страница 190: ...Doosan Robotics User Manual v1 9 190 ...