





























svn://software/hardware/LC4D/100218/docs/LC4D_MAN.doc
MRR
Page 3 of 20
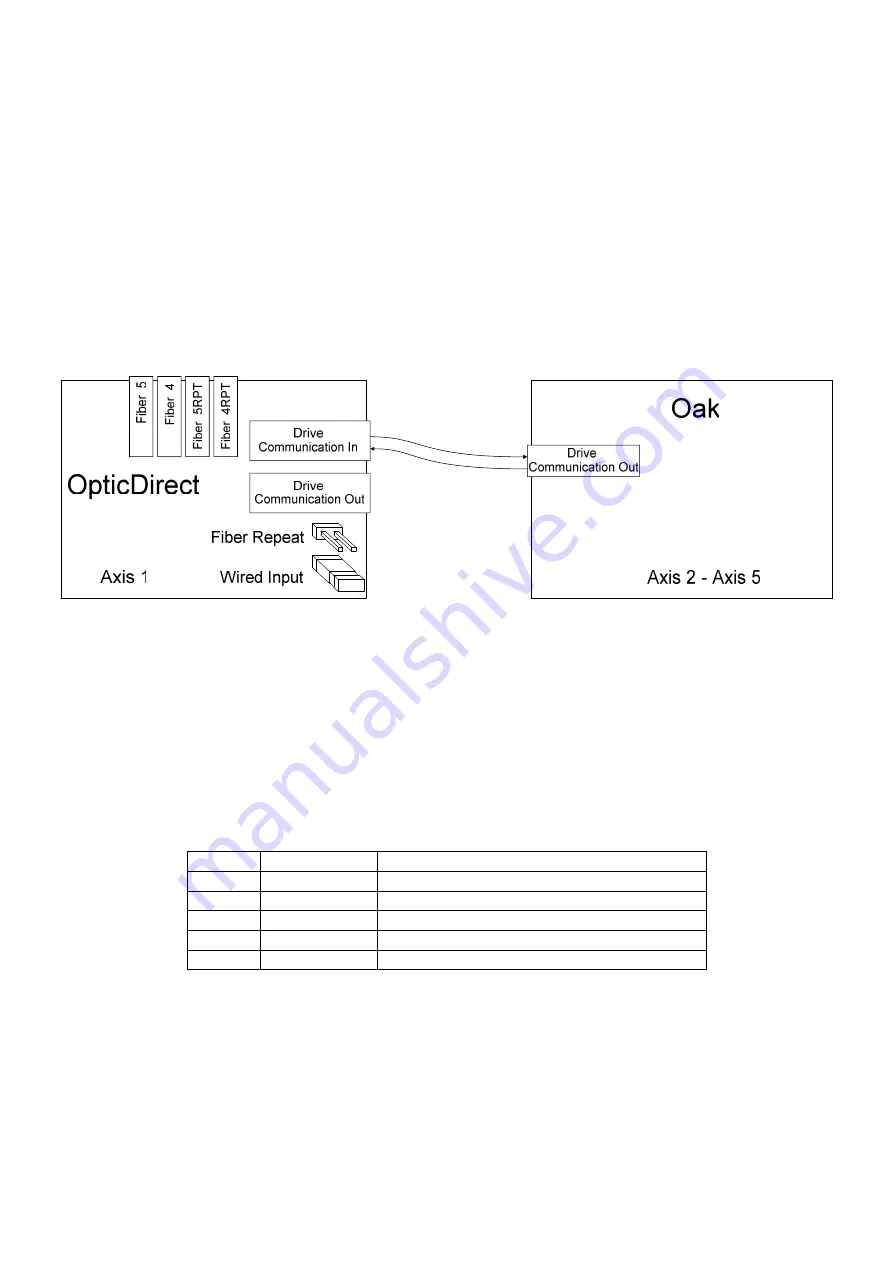
Additional drive interfaces or Centroid servo drives may be connected to Oak through the “Drive
Communication Out” connector. OpticDirect is the most common addition to the Oak for interfacing to
additional servo drives. LED1 status display will show the base or first axis number for the drive. For example,
an Oak that is running as axes 2, 3, and 4 will display 2 on LED1 as long as no error codes are present. The
axis farthest from the Oak in the communication chain will always be axis 1. Axis numbers increase along the
chain toward the Oak. In most systems, Oak will not need axis expansion, and LED1 will always show a solid
1.
If error codes exist, the decimal point on LED1 will light and an error number will flash. See the “LED1
Error Codes” chart for information on error codes.
Drive Communication Connection for OAK and OpticDirect
Parameters
The following table lists the parameters directly related to Oak that must be checked during installation.
The Oak control board can output signals to operate third party drives in torque, velocity, or position modes.
The desired operating mode must be known before setting drive dependent parameters.
Oak Parameters
Parameter Setting
Description
300-307
1 through 8
Drive axis mapping
308-315
1 through 6
Encoder assignments
357-364
Motor Dependent Maximum RPM
340-347
Drive Dependent Precision mode delay
256
Drive Dependent Drive mode
Содержание OAK
Страница 3: ......







































































