



























3. Configuration of the Operating Mode and System Parameters
10
© Copyright Reserved Autonics Co., Ltd.
3.2.1
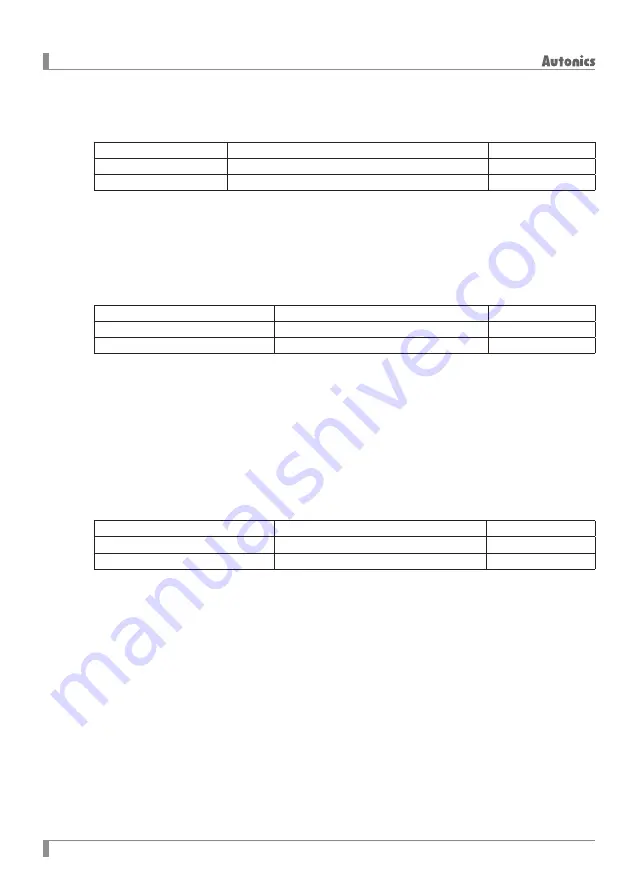
Limit Stop Mode and Limit Active Mode
When the Limit signal is activated, select the drive as Instant or Slow stop.
In addition, specify the Limit Active level.
Display
Selection
Default value
Limit Stop Mode
Instant(Instant stop) / Slow(Slow stop)
Instant
Limit Active Level
Low(GEX connection) / High(Open)
Low
The Limit input signal(LMT+/-) in +/- direction of each axis enters to pin #12/#13 of CN4 and 5
connector(Refer 7.2.4).
When the Limit input signal is activated, the Limit Stop mode selects Instant or Slow stop of drive.
In addition, the Limit Active Level specifies Low for GEX or High for open.
3.2.2
Servo Inposition Enable and Servo Inposition level
Select the operation for the Inposition signal from a servo motor driver.
Display
Selection
Default value
Servo Inposition Enable
Disable / Enable
Disable
Servo Inposition Level
Low(GEX connection) / High(Open)
Low
The Inposition input signal(nINPOS) on each axis is pin #6 of CN4 and 5 connector(Refer 7.2.4).
When the Servo Inposition Enable is configured as Enable, after the drive comes out and the controller
checks if nINPOS reaches to the active level and end, the drive. When the program is executed, after it
executes drive commands(ABC and INC) and checks if nINPOS reaches to the active level and operates
the next register.
The servo inposition Level configures whether nINPOS is activated in open or GEX connection. It selects
High if the nINPOS is activated in open, otherwise it selects Low.
If a step motor is used or nINPOS is not used, the level is configured as the default value.
3.2.3
Servo Alarm Enable and Servo Alarm Level
Select an operation of alarm signal from a servo motor driver.
Display
Selection
Default value
Servo Alarm Enable
Disable/ Enable
Disable
Servo Alarm Level
Low (GEX connection) / High (Open)
Low
The Servo Alarm input signal(nALARM) on each axis is pin #7 of CN4 and 5 connector(Refer 7.2.4).
When the Servo Alarm is configured as Enable and the Servo Alarm signal(nALARM) of the drive is acti
-
vated, the controller stops the drive output of the axis and makes the nERROR output signal ON.
The Servo Alarm Level configures whether nALARM is activated in OPEN or GEX connection.
It selects High if the nALARM is activated in Open, and it selects Low in GEX.
To cancel an error after error is occurred, it deactivates the nALARM and resets the controller.
If the nALARM is not used, the level is configured as the default value.
Содержание PMC-1 HS
Страница 29: ...3 Configuration of the Operating Mode and System Parameters 26 Copyright Reserved Autonics Co Ltd ...
Страница 39: ...4 Configuration of Operation Program 36 Copyright Reserved Autonics Co Ltd ...
Страница 61: ...6 Drive by Teaching Unit 58 Copyright Reserved Autonics Co Ltd ...
Страница 82: ...turkey autonics com DRW170814AB ...







































































