





























8-22
IM 05P01D31-01EN
8.2.5 PD Control (Stable Control in Which a Setpoint is not Exceeded)
Description
This control type performs control in which integral action (I action) is excluded from PID
action.
Set the integral time (I or Ic) to OFF.
It is useful when stable control in which a setpoint is not exceeded is desired for integral
processes in which constant flows are delivered.
The following shows the PID control computation formula.
MR
∆
PV
d
e
P
OUT
+
+
=
•
dt
100
Td
where OUT: control output, e: deviation (PV-SP), P: proportional band, Td: derivative time,
∆PV: PVn-PVn-1 (n-1: value before one control period), and MR: manual reset
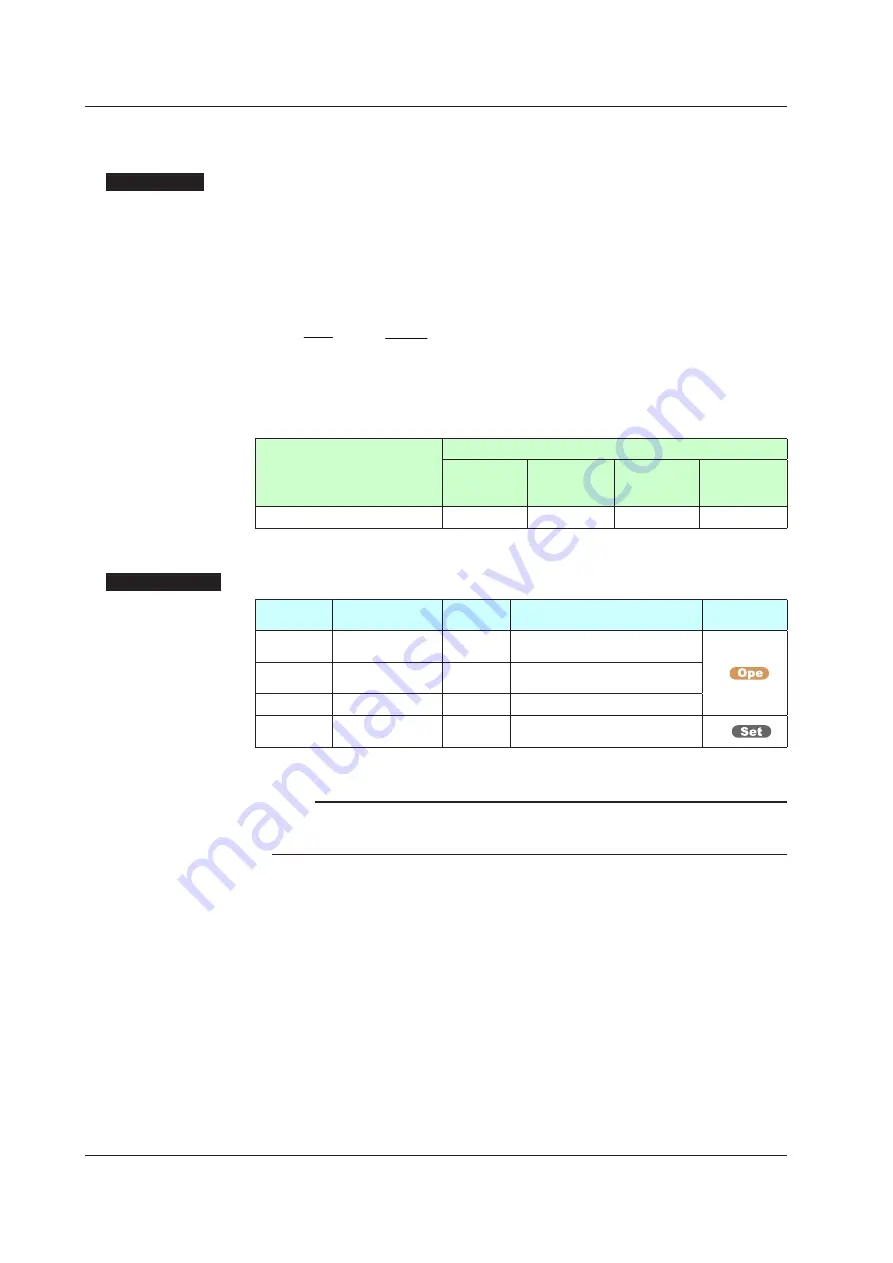
The following table shows combination of PD control and output method.
Output method
Current
output
Time
proportional
output
ON/OFF
output
Position
proportional
output
PD control
√
√
N/A
√
√: Available, N/A: Not available
Setting Details
Parameter
symbol
Name
Display
level
Setting range
Menu symbol
P
Proportional band
EASY
0.0 to 999.9%
When 0.0% is set, it operates as 0.1%.
PID
D
Derivative time
EASY
OFF: Disable
1 to 6000 s
MR
Manual reset
EASY
-5.0 to 105.0%
PIDG.
Number of PID
groups
STD
1 to 4
CTL
Note1: The PID number (1 to 4, or R) is displayed on Group display while the parameter P, D, or MR
is displayed.
Note
When changing the setpoint of the parameter PIDG., if the setpoint of the parameter PIDN
which belongs to the SP menu is larger than that of the parameter PIDG., the PIDN setpoint is
changed to the PIDG. setpoint.
8.2 Setting Control Type (CNT)
Summary of Contents for UT Advanced UT32A
Page 3: ......
Page 21: ...Blank Page...
Page 35: ...Blank Page...
Page 45: ...Blank Page...
Page 53: ...Blank Page...
Page 89: ...Blank Page...
Page 135: ...Blank Page...
Page 143: ...Blank Page...
Page 255: ...Blank Page...
Page 337: ...Blank Page...
Page 339: ...Blank Page...







































































