























5-9
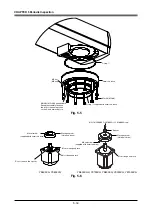
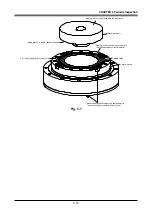
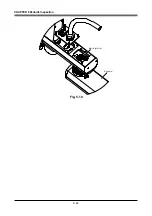
CHAPTER 5 Periodic Inspection
5
Replacing the Harmonic Drive
The YK-XG series robots listed in Table 5-1 use a harmonic drive as the speed
reduction gear for the X, Y and R axes. Harmonic drives need to be replaced after
a specified operation time. Use the guideline explained below to determine the
replacement period and replace the harmonic drive periodically. Since the YK-
XG series robots listed in Table 5-1 use long-life harmonic grease, it is not neces-
sary to replace the harmonic grease.
5-1
Replacement period
The harmonic drive replacement period is determined by the total number of
turns of the wave generator used in the harmonic drive. It is recommended to
replace the harmonic drive when the total number of turns has reached 8.4
×
10
8
(at ambient operating temperatures of 0
°
C to +40
°
C). This means that the re-
placement period will differ depending on the following operating conditions. If
the robot operation duty ratio is high or the robot is operated in environments at
higher temperatures, the harmonic drive should be replaced earlier.
Replacement period = 8.4
×
10
8
/(n
×
60
×
h
×
D
×
N
×θ
) years
where
n
: Number of axis movements per minute
θ
: Average turn per axis movement
N
: Speed reduction ratio
h
: Operation time per day
D
: Operation days per year
For example, when the robot is used under the following conditions, the replacement
period for the X-axis harmonic drive of the YK500XG can be calculated as follows.
n
: 10
θ
: 0.25
N
: 80
h
: 24 hours per day
D
: 240 days per year
Replacement period = 8.4
×
10
8
/(n
×
60
×
h
×
D
×
N
×θ
)
= 8.4
×
10
8
/(10
×
60
×
24
×
240
×
80
×
0.25)
= 12.2 years
Robot model
YK500XG, YK600XG
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
80
80
80
80
30
50
X-axis
Y-axis
R-axis
Table 5-1 Harmonic drive speed reduction ratio
Table 5-2 Bolt tightening torque
Bolt size
Tightening torque (kgfcm)
Tightening torque (Nm)
M3 button head bolt
14
20
1.4
M3
20
2.0
M4
46
4.5
M5
92
9.0
M6
156
15.3
M8
380
37
M10
720
71
M4 set screw
2.0
Recommended "Screw Lock": LOCTITE 262 (made by Henkel Corporation)
Use only YAMAHA genuine bolts or JIS B 1176 hex socket head bolts
(strength class: JIS B 1051 12.9).
Summary of Contents for YK-X Series
Page 1: ...User s Manual ENGLISH E YAMAHA SCARA ROBOT E35 Ver 1 08 YK XG YK X series ...
Page 2: ......
Page 6: ...MEMO ...
Page 10: ...MEMO ...
Page 12: ...MEMO ...
Page 30: ...MEMO ...
Page 36: ...MEMO ...
Page 46: ...3 10 CHAPTER 3 Installation Ground symbol M4 Ground terminal Fig 3 6 Ground terminal ...
Page 78: ...3 42 MEMO ...
Page 80: ...MEMO ...
Page 101: ...4 21 CHAPTER 4 Adjustment Cover Elongated hole Y axis origin sensor stay Bolt Fig 4 8 a ...
Page 102: ...4 22 CHAPTER 4 Adjustment Dog Hex nut Fig 4 8 b Bolt Y axis arm X axis arm Fig 4 8 c ...
Page 119: ...4 39 CHAPTER 4 Adjustment R End effector End effector Z Y X Fig 4 18 ...
Page 120: ...4 40 MEMO ...
Page 122: ...MEMO ...
Page 138: ...5 16 CHAPTER 5 Periodic Inspection M6 16 M5 16 X axis motor Base Fig 5 3 ...
Page 146: ...5 24 CHAPTER 5 Periodic Inspection M3 16 M4 18 X axis arm Fig 5 10 ...
Page 155: ...5 33 CHAPTER 5 Periodic Inspection O ring r M5 14 M6 16 R axis motor Fig 5 17 ...
Page 156: ...5 34 CHAPTER 5 Periodic Inspection M3 14 M3 16 O ring w Fig 5 18 ...
Page 161: ...CHAPTER 6 Increasing the robot operating speed 1 Increasing the robot operating speed 6 1 ...
Page 162: ...MEMO ...
Page 168: ...6 6 MEMO ...
Page 170: ...MEMO ...
Page 177: ...MEMO ...































































