













7-1
CHAPTER 7 Specifications
1
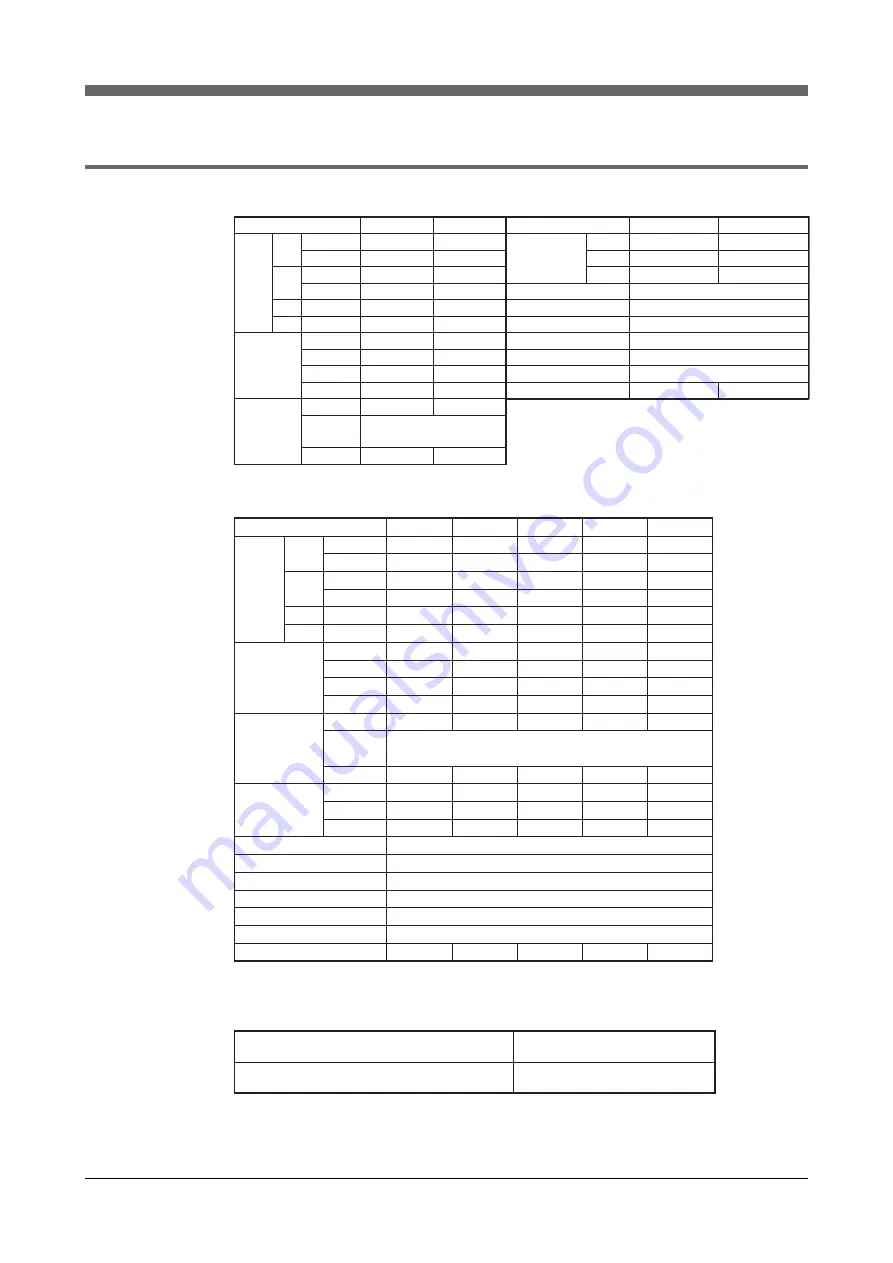
Manipulator
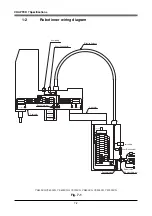
1-1
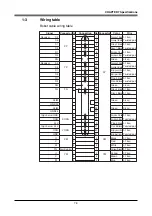
Basic specification
YK500XG
200mm
±
130
°
300mm
±
145
°
200, 300mm
±
360
°
400W
200W
200W
200W
7.6m/s
1700
°
/s
2.3m/s (200mm stroke Z-axis)
1.7m/s (300mm stroke Z-axis)
30kg
31kg
YK600XG
300mm
±
130
°
300mm
±
145
°
200, 300mm
±
360
°
400W
200W
200W
200W
8.4m/s
1700
°
/s
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
X-axis
Y-axis
Z-axis
R-axis
Axis
specifi-
cations
Motor
Maximum
speed
1.Soft limit 2.Mechanical limit (XYZ-axes)
3.5m (option: 5m, 10m)
Robot model
Robot model
*1 At constant ambient temperature (XY)
*2 There are limits to acceleration coefficient settings.
10kg
0.30kgm
2
(3.0kgfcms
2
)
20 cables
φ
6
×
3
YK500XG
±
0.01mm
±
0.01mm
±
0.005
°
YK600XG
±
0.01mm
±
0.01mm
±
0.005
°
Repeatability *1
Payload
R-axis tolerable moment of inertia *2
User wiring
User tubing
Travel limit
Robot cable
Weight
XY-axes
Z-axis
R-axis
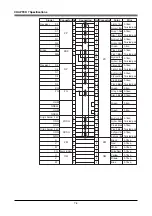
YK600XGH
200mm
±
130
°
400mm
±
150
°
200, 400mm
±
360
°
750W
400W
400W
200W
7.7m/s
1020
°
/s
±
0.02mm
±
0.01mm
±
0.005
°
2.3m/s (200mm stroke Z-axis)
1.7m/s (400mm stroke Z-axis)
48kg, 50kg
50kg, 52kg
52kg, 54kg
54kg, 56kg
56kg, 58kg
YK700XG
300mm
±
130
°
400mm
±
150
°
200, 400mm
±
360
°
750W
400W
400W
200W
8.4m/s
1020
°
/s
±
0.02mm
±
0.01mm
±
0.005
°
YK800XG
400mm
±
130
°
400mm
±
150
°
200, 400mm
±
360
°
750W
400W
400W
200W
9.2m/s
1020
°
/s
±
0.02mm
±
0.01mm
±
0.005
°
YK900XG
500mm
±
130
°
400mm
±
150
°
200, 400mm
±
360
°
750W
400W
400W
200W
9.9m/s
1020
°
/s
±
0.02mm
±
0.01mm
±
0.005
°
YK1000XG
600mm
±
130
°
400mm
±
150
°
200, 400mm
±
360
°
750W
400W
400W
200W
10.6m/s
1020
°
/s
±
0.02mm
±
0.01mm
±
0.005
°
1.Soft limit 2.Mechanical limit (XYZ-axes)
3.5m (option: 5m, 10m)
*1 At constant ambient temperature (XY)
*2 There are limits to acceleration coefficient settings.
20kg
1.0kgm
2
(10.0kgfcms
2
)
20 cables
φ
6
×
3
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
XY-axes
Z-axis
R-axis
X-axis
Y-axis
Z-axis
R-axis
Robot model
Axis
specifi-
cations
Motor
Maximum speed
Repeatability *1
Payload
R-axis tolerable moment of inertia *2
User wiring
User tubing
Travel limit
Robot cable
Weight
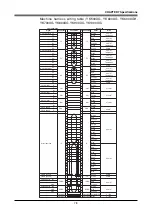
Maximum sound pressure level of the robot (when there is 10dB
or larger difference from the back ground sound pressure level)
Position where the maximum sound
pressure is measured
1 meter apart from the back of the robot,
1.6m height from the floor surface.
Note: The noise level can be higher when the robot is set nearby the objects that cause sound reflection.
Noise level
78.4dB
Summary of Contents for YK-X Series
Page 1: ...User s Manual ENGLISH E YAMAHA SCARA ROBOT E35 Ver 1 08 YK XG YK X series ...
Page 2: ......
Page 6: ...MEMO ...
Page 10: ...MEMO ...
Page 12: ...MEMO ...
Page 30: ...MEMO ...
Page 36: ...MEMO ...
Page 46: ...3 10 CHAPTER 3 Installation Ground symbol M4 Ground terminal Fig 3 6 Ground terminal ...
Page 78: ...3 42 MEMO ...
Page 80: ...MEMO ...
Page 101: ...4 21 CHAPTER 4 Adjustment Cover Elongated hole Y axis origin sensor stay Bolt Fig 4 8 a ...
Page 102: ...4 22 CHAPTER 4 Adjustment Dog Hex nut Fig 4 8 b Bolt Y axis arm X axis arm Fig 4 8 c ...
Page 119: ...4 39 CHAPTER 4 Adjustment R End effector End effector Z Y X Fig 4 18 ...
Page 120: ...4 40 MEMO ...
Page 122: ...MEMO ...
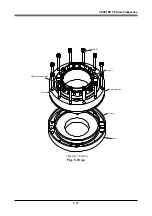
Page 138: ...5 16 CHAPTER 5 Periodic Inspection M6 16 M5 16 X axis motor Base Fig 5 3 ...
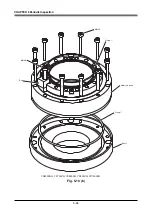
Page 146: ...5 24 CHAPTER 5 Periodic Inspection M3 16 M4 18 X axis arm Fig 5 10 ...
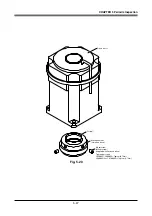
Page 155: ...5 33 CHAPTER 5 Periodic Inspection O ring r M5 14 M6 16 R axis motor Fig 5 17 ...
Page 156: ...5 34 CHAPTER 5 Periodic Inspection M3 14 M3 16 O ring w Fig 5 18 ...
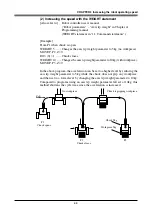
Page 161: ...CHAPTER 6 Increasing the robot operating speed 1 Increasing the robot operating speed 6 1 ...
Page 162: ...MEMO ...
Page 168: ...6 6 MEMO ...
Page 170: ...MEMO ...
Page 177: ...MEMO ...






























































