





























7-
7
7
EDITING POINT DA
TA
7-4 Manual Control of General-Purpose Output
7-4
Manual Control of General-Purpose Output
When performing teaching playback or direct teaching with systems that use a general-purpose
output through the I/O interface to operate a gripper or other tools, you may want to check the
position of workpiece by actually moving it.
For this reason, the DRCX controller is designed to allow manual control of general-purpose outputs
from the TPB.
1) Move the robot with the same procedure up to
step 6 in "7-2 Teaching Playback" or up to step
7 in "7-3 Direct Teaching".
The following steps are explained using the
teaching playback screen.
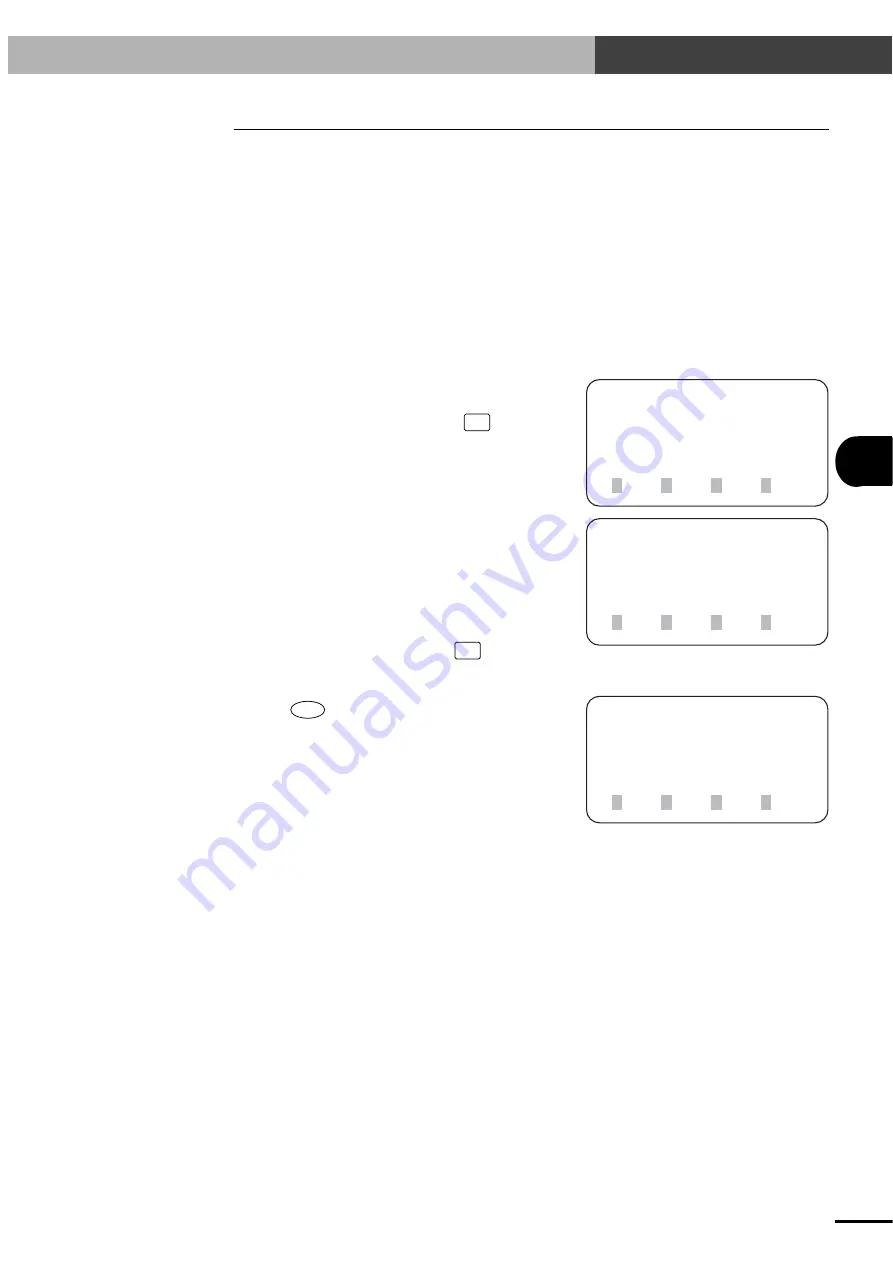
2) When the robot reaches the point where you
want to use a general-purpose output, tempo-
rarily stop the operation and press
F2
(DO).
[EDIT-PNT-TCH](1) 50
P0 X=0.00 [mm]
[ 0.00, 0.00]
1CHG 2DO 3Y 4next
[EDIT-PNT-TCH](1) 50
DO 0=0 DO 1=0 DO 2=0
DO 3=0 DO 4=0 DO 5=0
1DO0 2DO1 3DO2 4next
[EDIT-PNT-TCH](1) 50
P0 X=0.00 [mm]
[ 0.00, 0.00]
1CHG 2DO 3Y 4next
3) The current status of the general-purpose out-
put appears on the screen.
Press the function key that matches the DO
number to switch the output on and off (on=1,
off=0).
If selecting DO3 to DO12, press
F4
(next) a
few times to change the menu display.
4) Press
ESC
to return to step 2.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com