


























iR-PU01-P
32
60EEh+n*800h
Additional feed constant
-driving shaft revolutions
01h
1st additional feed constant
-driving shaft revolutions
UDINT
rw
1
02h
2nd additional feed constant
-driving shaft revolutions
UDINT
rw
1
60FCh+n*800h 00h
Position demand internal value
DINT
ro
0h
60FDh+n*800h 00h
Digital inputs
UDINT
ro
0h
60FFh+n*800h
00h
Target velocity
DINT
rw
0
6502h+n*800h 00h
Supported drive modes
UDINT
ro
25h
67FFh+n*800h
00h
Device type
UDINT
ro
FFFF0192h
9.
Motion Control Function Blocks
Weintek Motion Control Function Blocks designed according to PLCopen Motion
Control makes it easy to give motion control instructions to iR-PU01-P.
Motion Control Function Block List
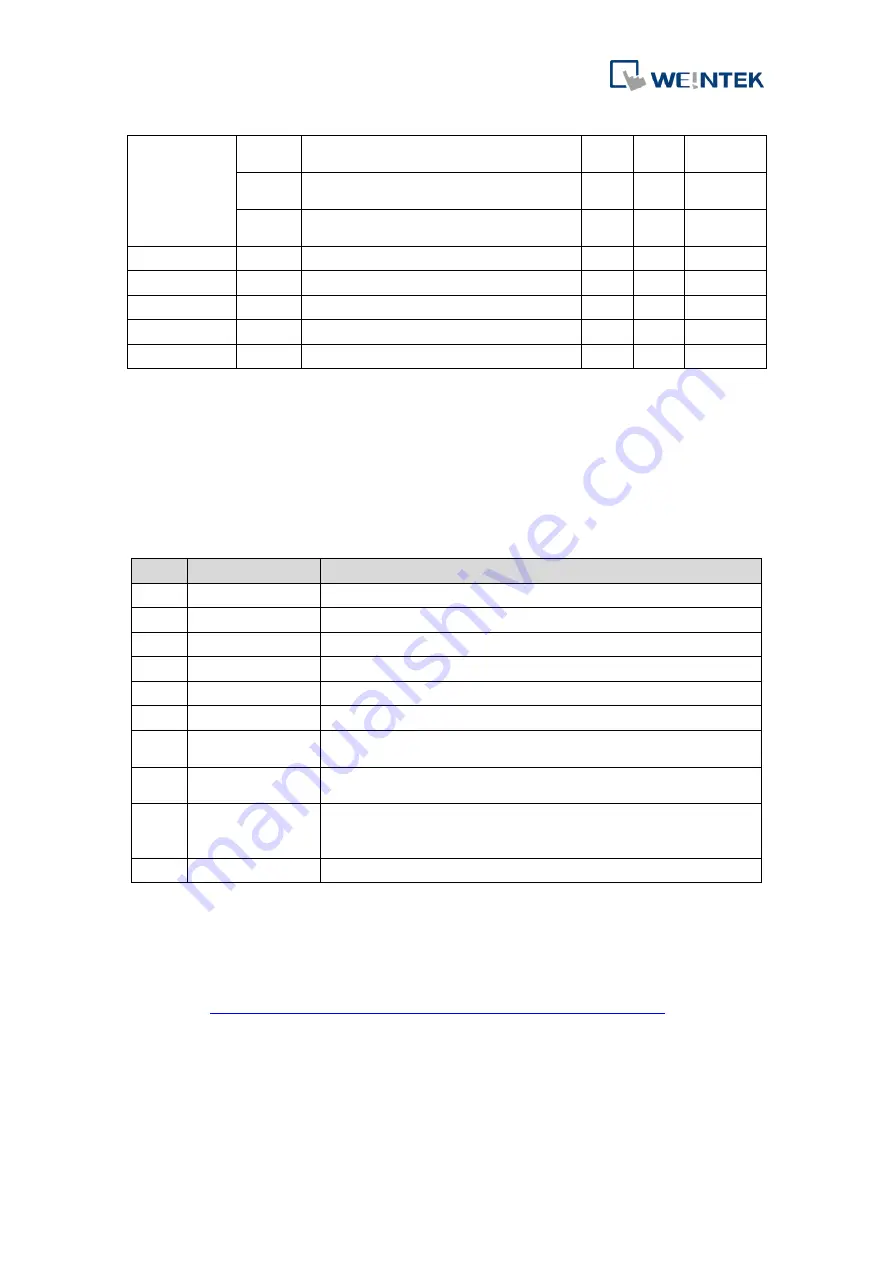
9.1
Item
Name
Description
1
AXIS_REF_LITE
Information on the corresponding axis.
2
MC_Power
Starts or stops the system.
3
MC_Home
Performs homing.
4
MC_MoveVelocity
Performs velocity control.
5
MC_MoveAbsolute Performs positioning for the specified absolute target position.
6
MC_MoveRelative
Performs positioning for a relative position.
7
MC_Gear
Specifies the gear ratio between the master axis and the slave axis
and starts gear operation.
8
MC_Stop
Decelerates an axis to a stop. Motion instructions can only be given
after the axis stops.
9
MC_Halt
Stops axis operation and ends all motion control function blocks. The
speed returns to 0. Motion instructions can be given to interrupt
MC_Halt.
10
MC_Reset
Clears axis error and make the axis return to Standstill state.
Download and Install
9.2
Step 1.
Open the Download page in Weintek official website, search for
cMT+CODESYS Package, download and install the package.
https://www.weintek.com/globalw/Download/Download.aspx
Step 2.
In CODESYS software interface, add Weintek CODESYS Library.







































































