





























Page 31 of 58
POS-123-*-2030
5.6.5
PT1 (Timing of the controller)
Command
Parameter
Unit
Group
PT1
x
x= 0… 300
ms
EXP
This parameter can be used to change the internal timing of the control function.
Hydraulic drives are often critical to control especially in case of high speeds and very fast valves. The PT1
filter can be used to improve the damping rate and allows therefore higher loop gains. Requirements for the
use are: The natural frequency of the valve should be equal or higher than the natural frequency of the drive.
5.6.6
CTRL (Deceleration characteristics)
Command
Parameters
Unit
Group
CTRL
x
x= LIN|SQRT1|SQRT2 -
STD
The deceleration characteristic is set with this parameter. In case of positively overlapped proportional valves
the SQRT function should be used. The non-linear flow function of these valves is linearized by the SQRT
10
function.
In case of zero lapped valves (control valves and servo valves) the LIN or SQRT1 function should be used
regardless of the application. The progressive characteristic of the SQRT1 function has better positioning
accuracy but can also lead to longer positioning times in individual cases.
LIN:
Linear deceleration characteristic (gain is increased by a factor of 1).
SQRT1:
Root function for braking curve calculation. The gain is increased by a factor of 3 (in the target
position). This is the default setting.
SQRT2:
Root function for braking curve calculation. The gain is increased by a factor of 5 (in the target
position). This setting should only be used with a significantly progressive flow through the valve.
10
The SQRT function generates constant deceleration and thus reaches the target position faster. This is achieved by in-
creasing the gain during the deceleration process.
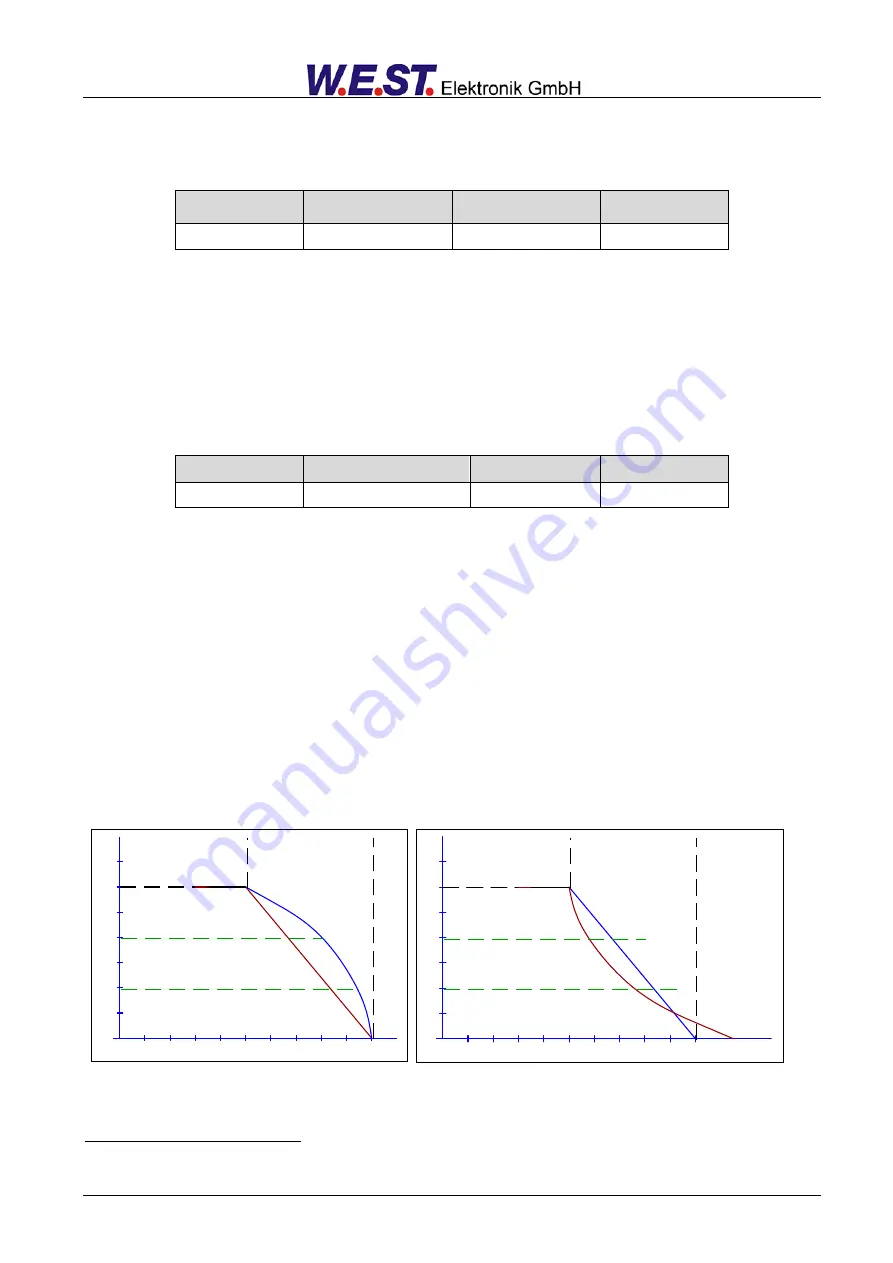
Figure 2 (Braking function with respect to stroke and time)
Stroke
V
e
lo
ci
ty
Braking stroke
D:A or D:B
CTRL = LIN
CTRL = SQRT
Time
V
e
lo
ci
ty
Deceleration time
D:A or D:B
CTRL = LIN
CTRL = SQRT







































































