





























Alarms, faults and system messages
10.6 List of alarms and faults
Converter with control units CU250D-2
336
Operating Instructions, 04/2015, FW V4.7.3, A5E34261542B AB
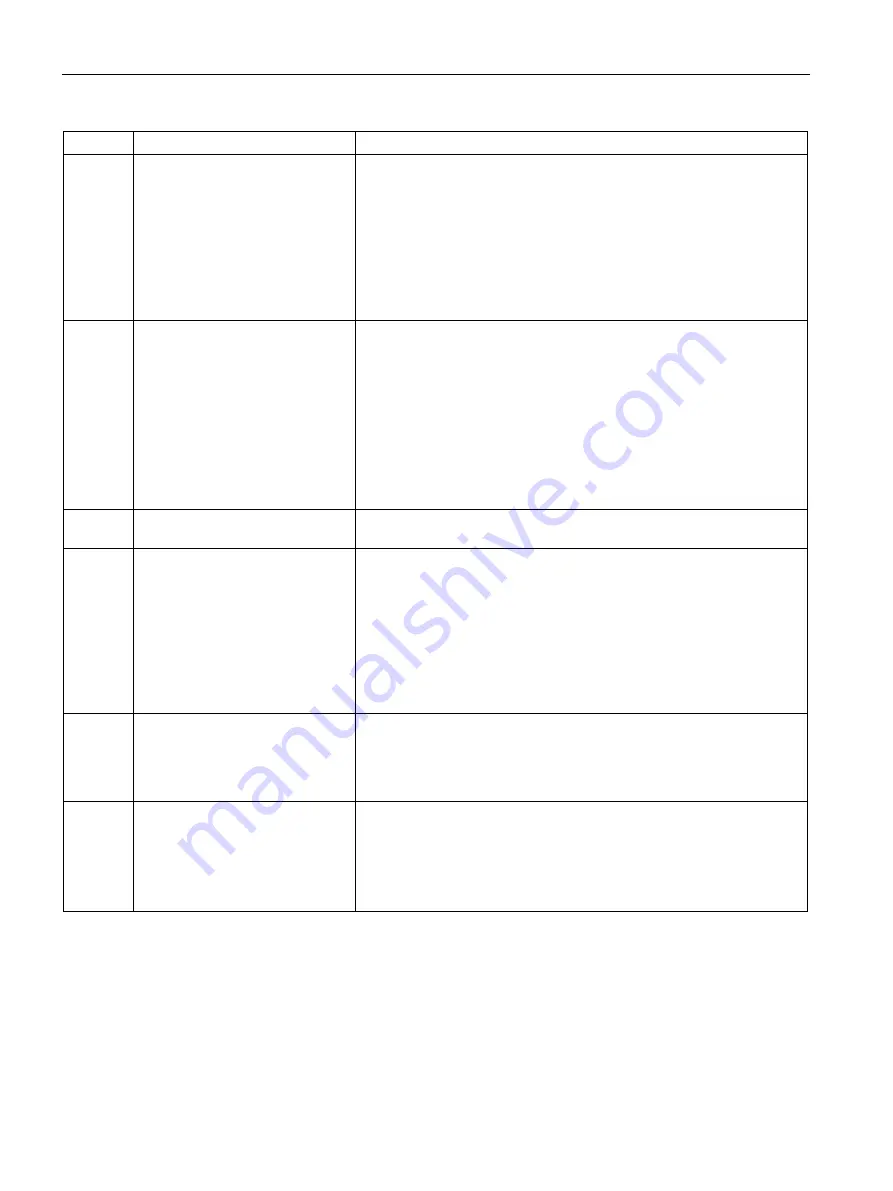
Number Cause
Remedy
F07451
Position monitoring has responded When the positioning monitoring time expired (p2545), the drive had still
not reached the positioning window (p2544). Check whether the following
is set correctly:
•
Positioning window too small (p2544)?
•
Positioning monitoring time too short (p2545)?
•
Position loop gain too low (p2538)?
•
Position loop gain too high (instability/oscillatory behavior, p2538)?
Another possible cause: Mechanical clamping.
F07452
Following error too high
The difference between the position setpoint and the actual position value
(following error dynamic model, r2563) is higher than the tolerance
(p2546). Possible causes:
•
The drive torque or accelerating capacity has been exceeded.
•
Position measuring system fault.
•
Position control sense is not correct.
•
Mechanical system locked.
•
Excessively high traversing velocity or excessively high position set-
point differences.
F07453
Position actual value processing
error
Check the encoder for the actual position value processing.
A07454
Position actual value processing
does not have a valid encoder
Check whether one of the following causes exists:
•
An encoder is not assigned for the position actual value processing
(p2502 = 0).
•
An encoder is assigned, but no encoder data set has been assigned
(p0187 = 99 or p0188 = 99 or p0189 = 99).
•
An encoder and an encoder data set have been assigned, however,
the encoder data set does not contain any encoder data (p0400 = 0)
or invalid data (e.g. p0408 = 0).
A07455
Maximum velocity limited
The maximum velocity (p2571) is too high to correctly calculate the modu-
lo correction. Remedy:
•
Reduce the maximum velocity (p2571).
•
Increase the sampling time for positioning (p0115[ 5]).
A07456
Setpoint velocity limited
The actual setpoint velocity is greater than the parameterized maximum
velocity (p2571), and is therefore limited. Remedy:
•
Check the entered setpoint velocity.
•
Reduce the velocity override (CI: p2646).
•
Increase the maximum velocity (p2571).







































































