





























90
Manual – IPOSplus®
6
Cam controllers
Position Detection and Positioning
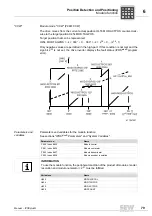
• Any changes in the data structure will be adopted every 1 ms. This step changes the
limits of a position window during the execution time; these will be considered during
the next processing cycle of the cam. This option makes it possible to use other cam
areas for the return travel in case of a reversing axis.
• All outputs can be stored contiguously from any bit of a variable.
• It is possible to set outputs, i.e. to fix their setting to 1 or 0 in the program.
• The reference value can be set, typical reference sizes are:
– H511 - Current actual position, motor encoder
– H510 - Current actual position, external encoder
– H509 - Current actual position, SSI absolute encoder (DIP11A option)
– H455 - Current actual position, motor encoder in modulo format
– H376 - Current actual position, master value (only for the technology functions
electronic cam or internal synchronous operation)
• You can stop the expanded cam function by calling up GETSYS with bit 31 = 0. This
step stops processing in the firmware and the function no longer requires any
processor capacity. If, however, the CamState is assigned 0x8000 0000, the cam
function will also be stopped but runs in the background without setting any outputs.
Starting the
expanded cam
control
Compiler:
_GetSys(CamArray ,GS_CAM );
Initializes the cam controller and generates the status of all outputs with the data struc-
ture as of the variable CamArray
Assembler:
GETSYS Hxx = CAM
Initializes the cam controller and generates the status of all outputs with the data struc-
ture as of the variable Hxx
Data structure of
the expanded cam
control
The expanded cam function is configured with the help of two data structures, i.e. the
CamControl structure and the CamOutput structure.
• The CamControl structure controls the global behavior of the expanded cam
function.
• The CamOutput structure is used to define an output (output of the cam disk) and
may be required up to eight times.
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n





















































