





























Manual – IPOSplus®
85
6
Cam controllers
Position Detection and Positioning
6.8.1
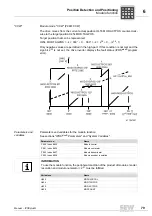
Standard cam controller
Characteristics of
the standard cam
controller
• It is available with encoder for all operating modes.
• Per declaration and request of a data structure, one output with delay compensation
is set or reset depending on the four position windows (defined by a CCW and CW
limit value).
• The limits of the positioning window can be altered during the execution time and will
be taken into consideration with the next GETSYS command. This option makes it
possible to use other cam areas for the return travel in case of a reversing axis.
• The cam output can be assigned to any bit of a variable.
• An unlimited number of outputs is theoretically possible, but the number of outputs is
practically limited by the IPOS
plus®
program length and the acceptable execution
time.
• A new output will be formed with the GETSYS command, regardless of whether the
drive is referenced or not.
• The GETSYS command initializes the function and forms the new status of the
output a single time once the command is given. The command must be activated
every time a new status is required in the IPOS
plus®
program – the new generation
of the cam output depends on the program cycle time.
• The reference value can be set, typical reference sizes are:
– H511 - Current actual position, motor encoder
– H510 - Current actual position, external encoder
– H509 - current actual position, SSI absolute encoder (DIP11A option)
– H455 - Current actual position, motor encoder in modulo format
– H376 - Current actual position, master value (only for the technology functions
electronic cam or internal synchronous operation)
• The cam outputs keep their values in between the GETSYS commands and are only
deleted after a reset.
• If the cam function is activated n times per 1 ms, n cam outputs can be generated
(e.g. in a quick task, such as task 3 in MOVIDRIVE
®
B, which can process several
IPOS
plus®
commands per 1 ms). Since MOVIDRIVE
®
generates a new position
value every 1 ms, all of the commands processed during the 1 ms period operate with
the same position value.
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n





















































