





























88
Manual – IPOSplus®
6
Cam controllers
Position Detection and Positioning
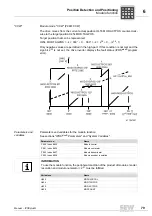
Example solved in
the Compiler
/*=============================================
IPOS source file
===============================================*/
#include <const.h>
#include <io.h>
//Declaration
GSCAM Cam1, Cam2;
//Declaration of cam outputs 1 and 2
/*=============================================
Main function (IPOS initial function)
===============================================*/
main()
{
/*-------------------------------------
Initialization
--------------------------------------*/
°°Cam1.SourceVar = numof(ActPos_Mot); // Reference size motor encoder
Cam1.DbPreCtrl = 0; // no delay time compensation
Cam1.DestVar = numof(StdOutpIPOS); // Output onf Do01 (H481.1)
°°Cam1.BitPosition = 1;
°°Cam1.BitValue = 0; // Output = 1, if value in window
Cam1.NumOfCam = 3; // Number of windows
Cam1.PosL1 = 0; // 1st window, left limit value
° Cam1.PosR1 = 4096; // 1st window, right limit value
° Cam1.PosL2 = 20366; // 2nd window, left limit value
° Cam1.PosR2 = 20594; // 2nd window, right limit value
° Cam1.PosL3 = 36864; // 3rd window, left limit value
°Cam1.PosR3 = 40960; // 3rd window, right limit value
°°Cam2.SourceVar = numof(ActPos_Mot); // Reference size motor encoder
Cam2.DbPreCtrl = 0; // no delay time compensation
° Cam2.DestVar = numof(StdOutpIPOS); // Output onf Do02 (H481.2)
°°Cam2.BitPosition = 2;
°°Cam2.BitValue = 0; // Output = 1, if value in window
Cam2.NumOfCam = 1; // Number of windows
° Cam2.PosL1 = 4096; // 1st window, left limit value
° Cam2.PosR1 = 8192; // 1st window, right limit value
/*-------------------------------------
Main program loop
--------------------------------------*/
while(1)
{
_GetSys(Cam1 ,GS_CAM ); // Form output of first cam
_GetSys(Cam2 ,GS_CAM ); // Form output of second cam
}
}
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n





















































