

























372
Manual – IPOSplus®
24
"Table positioning" sample program
Assembler – Examples
24.4 "Table positioning" sample program
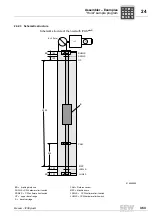
24.4.1 Characteristics
• Binary coded selection of 16 table positions.
• Binary coded output of the currently selected table positioning.
• Clear message when selected table position has been reached.
• Automatic movement away from hardware limit switches.
The first 4 binary inputs of the DIO11B option can be used for selecting 16 table posi-
tions (travel variables H000 ... H015) in binary coded format. When a travel variable
number is selected (table pointer), it is always represented at the first 4 binary inputs of
the DIO11A in binary coded format.
Reference movement must be activated using input DI16 "Reference travel" before you
can move the drive to table positions. You can use input DI17 "Start positioning" to en-
able/interrupt the travel job (with "Controller inhibit" and "Enable" = "1" signal). When a
new table position is selected, it is advisable to set input DI17 to a "0" signal until it is
certain that all the bits of the table pointer have been set.
------------------------------------------
Jog +
------------------------------------------
M30: JMP LO I0000010000000000, M31
JMP HI I0000100000000000, M31
CALL M35
JMP H319 == 1 , M32
GETSYS H317 = ACT.POSITION
ADD H317 + 4096000
M32 : ASTOP IPOS ENABLE
GOA NOWAIT H317
JMP UNCONDITIONED , M30
M31 : ASTOP TARGET POSITION
RET
------------------------------------------
Jog -
------------------------------------------
M40: JMP LO I0000100000000000, M41
JMP HI I0000010000000000, M41
CALL M35
JMP H319 == 1 , M42
GETSYS H318 = ACT.POSITION
SUB H318 - 4096000
M42 : ASTOP IPOS ENABLE
GOA NOWAIT H318
JMP UNCONDITIONED , M40
M41 : ASTOP TARGET POSITION
RET
------------------------------------------
Jog mode end
------------------------------------------
END
Jog CW
Move for as long as DI14 = 1 and
DI15 = 0,
Query: Is software limit switch active?
Add 1000 motor revolutions to the current actual position
and use the result as the new target position
Jog CCW
Move for as long as DI14 = 0 and
DI15 = 1,
Query: Is software limit switch active?
Add 1000 motor revolutions to the current actual position
and use the result as the new target position
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n





















































