RT-500-M
RHOTHETA
Page 45 of 168
User Manual
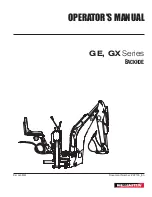
“Monitoring” On
Active frequency:
Main frequency = COSPAS-
SARSAT frequency, which is not
known yet.
The system performs the
COSPAS-SARSAT scan in order to
determine the COSPAS-SARSAT
sender frequency.
Signal is not present.
“Monitoring” On
Active frequency:
Monitoring frequency = 243.000 MHz
Signal is not present.
The system recognized a sender on
the 406.041 MHz frequency, which is
shown in place of the main bearing
frequency.
Figure 32. “Monitoring CP-SS” mode. Example views of the “Bearing” page
In the case of COSPAS-SARSAT frequency as the main bearing frequency, the Monitoring CP-SS
function is activated automatically, when the “Monitoring” scan is selected.
This operation mode differs from the normal monitoring mode with a non-CP-SS-frequency as the
main bearing frequency (s. 7.2.2.2).
The “CP-SS” monitoring procedure will first look for the COSPAS-SARSAT signal and then, if no pulse
has been detected for 60 seconds, it will search for other monitoring frequencies one after another
(not alternating with the main frequency as it is in the standard case).
If a COSPAS-SARSAT signal is detected, the system releases an alarm and decode the pulse, which
can then be seen on the “Decode” page.
Note
If a valid COSPAS-SARSAT signal is detected during the 60-seconds-period of the monitoring
procedure, the correct COSPAS-SARSAT frequency channel of the sender is determined in the first
cycle (first 60 seconds period of the CP-SS scan).
Only at the second cycle of this scan algorithm the bearing and decoding information of a COSPAS-
SARSAT signal is stored and shown on the corresponding pages.
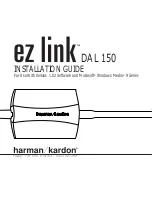
7.2.2.1 Timing of Normal Monitoring Operation
The main frequency
(here channel 16) is
monitored with the
highest priority. The
duration of the
monitoring cycles may
be extended if signals are received on the monitoring frequencies.
Figure 33. Example: Timing normal monitoring