





























Section V Parameter Function Table
113
S
ect
io
n
V
The PID integral time determines the integral regulation speed,the regulation acts on the
difference between PID feedback and setting value by PID regulator.
When the difference between PID feedback and setting value is 100% , integral regulator
PID regulator ouput=(P01*F12*12.5%)Hz.(single direction PIDregulation,ignores proportion and
differential effect).
If the value is great,the control is stable but response is slow;if the value is little,the system
response is rapid but perhaps surge occurs.
P06
PID differencial time
0.000~10.000
s
0.000
Y
The parameter determines the regulation intensity, the regulation acts on the change ratio of
the difference between PID feedback and setting value by PID regulator.
When the change ratio of the difference between PID feedback and setting value is 100% in
the differential time, PID regulator regulates output to(P01*F12*12.5%)Hz (single direction PID
regulation, ignores proportion and integral effect).
If the value is great, the greater the intensity is, the system surge is to occur more easily
P07
PID proportion gain
0~1000.0
%
100.0
Y
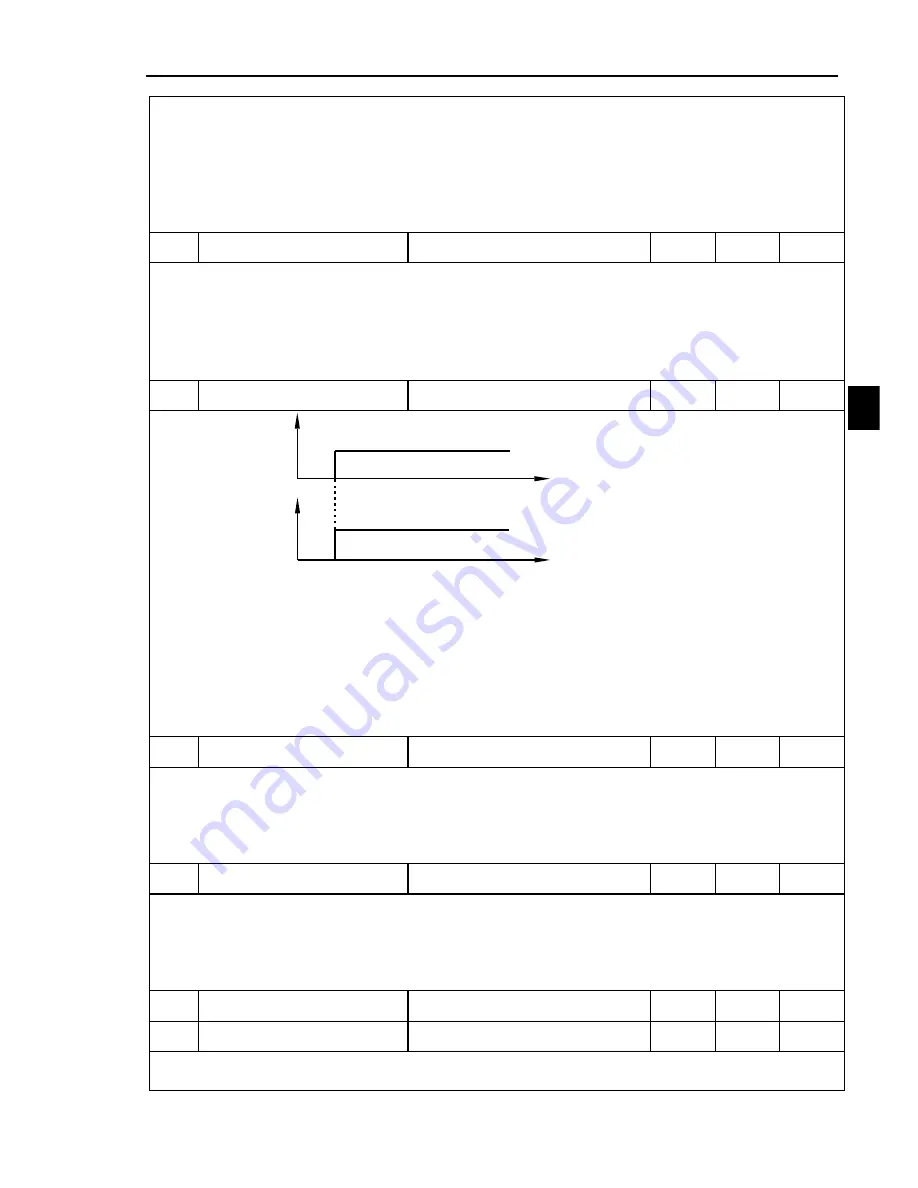
time
time
operation value
difference
The PID Proportion Gain defines regulation intensity of PID regulator, the larger the P is,
the more the intensity is.
When proportion gain is 100%,and the difference between PID feedback and getting value is
100%, PID regulator‟s output is(P01*F12*12.5%)Hz(single direction PID regulation,ignores
differential and integral effect).
Proportion gain is the parameter decides PID regulator‟s response extent.
If the gain is great, the response is rapid, but if too great, the surge will occur; the gain is
little, the response will lag.
P08
PID sampling period
0.002~10.000
s
0.010
Y
Set Sampling period of feedback signal.
When set this parameter small, the system response speed to the giving and feedback
deviation is slow, but control is stable.
When set this parameter low,the system response speed to the giving and feedback deviation
is slow, but easy to cause vibration
P09
Deviation limit
0.0~20.0
%
5.0
Y
Deviation limit effects system control accuracy and stability.
When the deviation of feedback signal and giving signal <deviation limit, PID N regulation,
keep output stable.
When the deviation of feedback singnal and giving signal >deviation limit, PID regulates
according to deviation, update output
P10
PID fault detect time
0.0~3200.0
s
0.0
N
P11
PID fault detected value
0.0~100.0
%
10.0
N
Set P10 to 0. 0 for N fault inspection.
When PID feedback signal <P11 set PID fault inspection value, last P10set time, regard it as