




























10 Setting ranges and Initial values by series
−
79
−
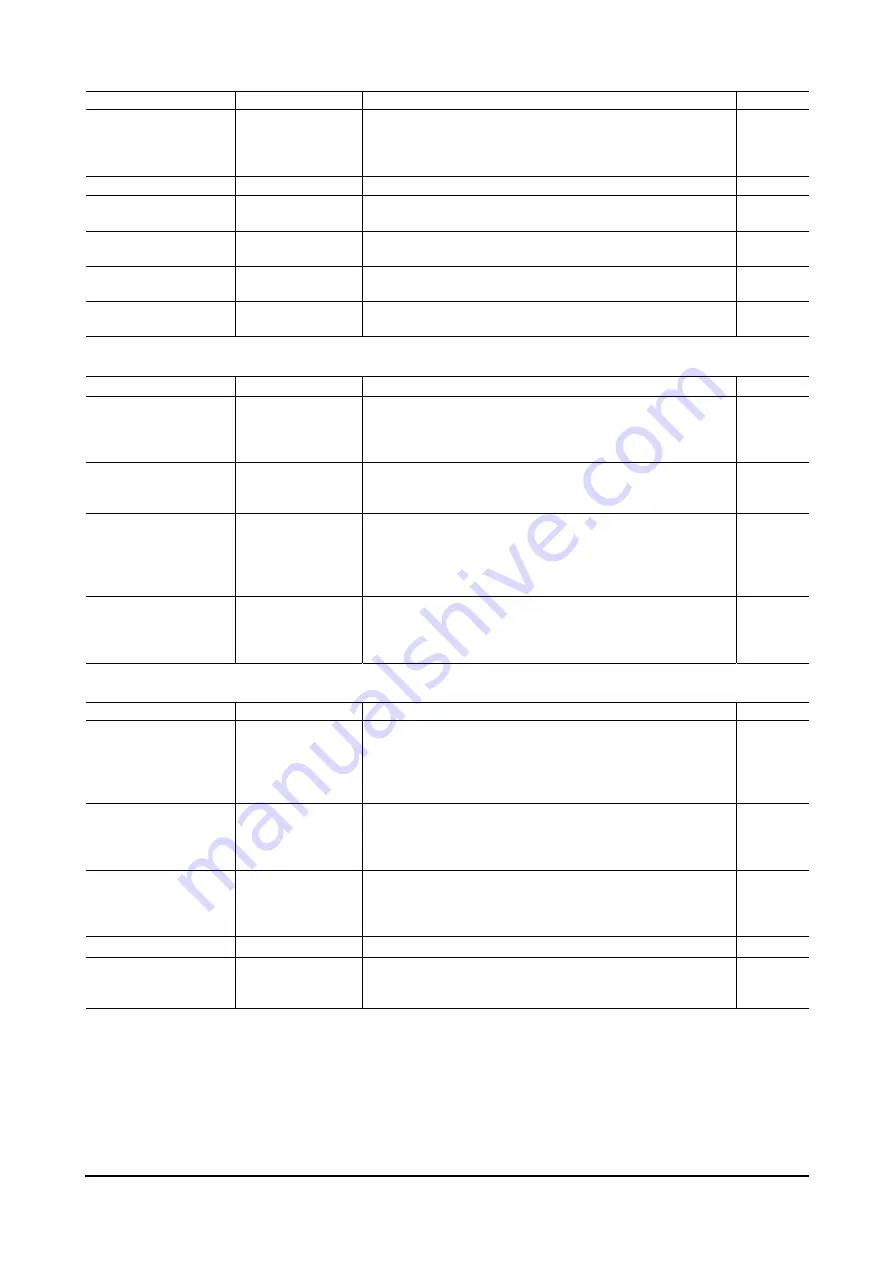
Parameters Display
Description
Reference
PRESET position
PRES
When the PRESET input is turned ON at a desired position,
such position will be set as the PRESET position. The setting
will be cancelled when a return-to-home operation is
performed.
p.27
Pulse input switching
Pulse Typ
Select the pulse input mode to be used in the driver mode.
p.32, p.41
LS detection
enable/disable
LS Detect
Set this parameter to “Enable” if limit sensor inputs are to be
used.
p.13
LS logic
LS LGC
Set the input logic (normally open or normally closed) of the
limit sensor inputs (+LS and -LS).
−
HOME logic
HOME LGC
Set the input logic (normally open or normally closed) of the
HOMELS.
p.27
Overtravel LS
Act
Set the stop method to be used upon detection of a limit sensor
signal.
−
Motor parameters
Parameters Display
Description
Reference
Operating current
Run Cur.
Set the motor current during operation (other than push-motion
operation) as a percentage [%] of the motor rated current. The
thrust force during operation is roughly proportional to the
operating current.
−
Standstill current
Stop Cur.
Set the motor current at standstill as a percentage [%] of the
rated motor current. The holding torque at standstill is roughly
proportional to the standstill current.
−
Speed filter
Filter
Set the motor response to the operation commands. The
greater the value set in this parameter, the more gradual the
speed change becomes at standstill and consequently the
smaller the vibration (damping) becomes at standstill. However,
positioning takes a longer time.
p.37
END signal detection
width
END Width
Set the range within which an END signal will be output. When
the Linear and Rotary Actuator stops, the END output will turn
ON if the difference between the command position and the
actual position is within the END output range.
p.37
Home parameters
Parameters Display
Description
Reference
Return direction
HomeDir
Set the return direction. If the home is on the opposite-motor
side and the motor side of the coordinate system is set as
negative, set this parameter to “Opposite-motor side.” For the
operating coordinates, refer to the common parameter
“Coordinate Setting.”
p.25
Home offset
Pos
The home position detected as a result of return-to-home
operation is shifted by the distance set as the home offset, and
the resulting position is defined as the home (current position=
0 mm).
p.25
Return method
Home
Select the return-to-home operation method from among “Push
motion 1,” “Push motion 2,” “2-sensor mode” and “3-sensor
mode.” “Push motion 2” is supported by the
EZS
Ⅱ
series,
EZC
Ⅱ
series and
EZA
series.
p.25
Starting speed of return HVs
Set the starting speed of return to home.
p.25
Operating speed of
return
HVr
Set the operating speed of return to home. The acceleration
and deceleration will correspond to the values set in
acceleration No.0 and deceleration No.0, respectively.
p.25
Summary of Contents for EZ limo ESMC-A2
Page 92: ......






































































