





























Hardware reference
HARDWARE REFERENCE MANUAL
57
Revision 5.0
3.1.2
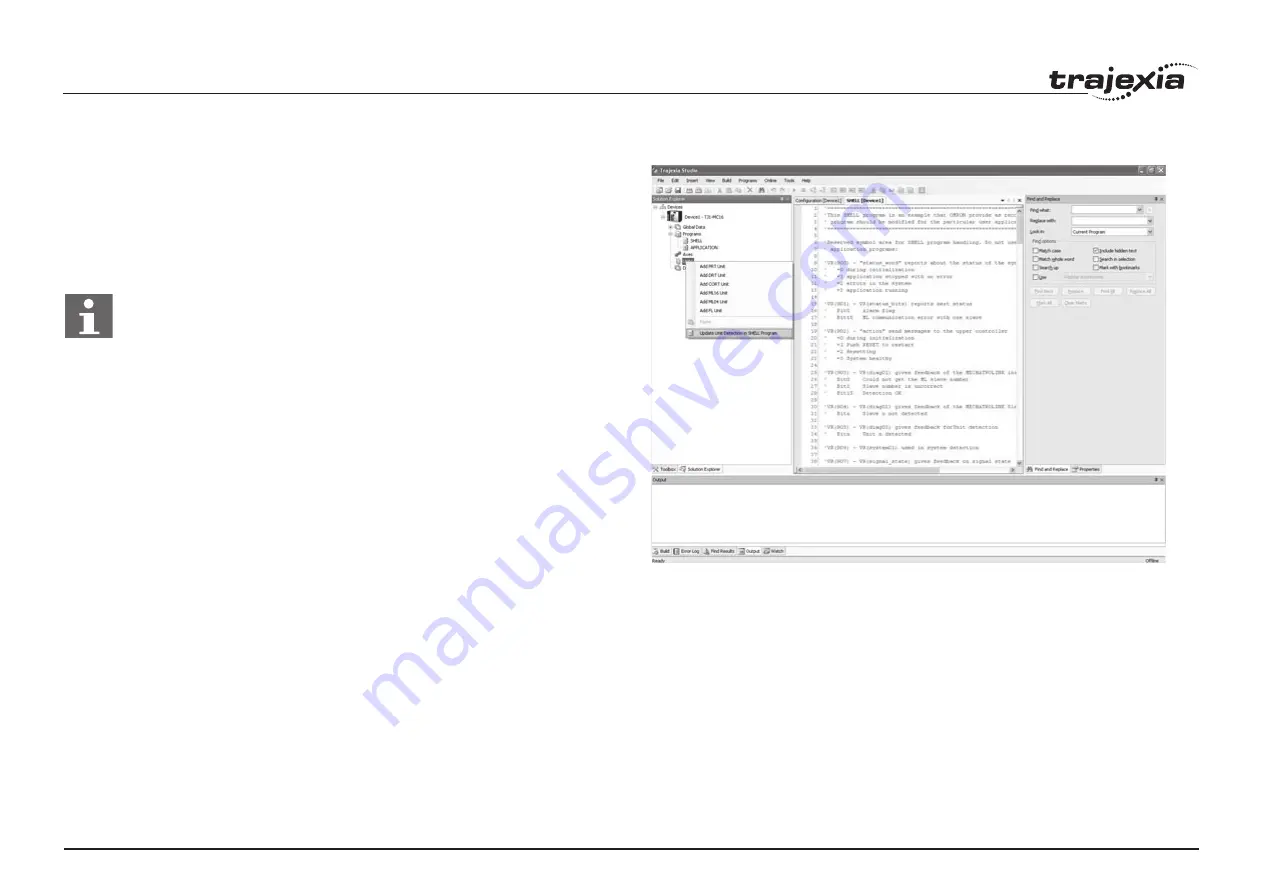
Trajexia Studio and CX-Motion Pro
fig. 2
One software
Trajexia's intuitive and easy programming tool, based on the Motion BASIC
instruction set, includes dedicated commands for linking axes, e-cams, e-
gearboxes, etc. Multi-tasking provides flexibility in application design. The
motion commands are "buffered" so the BASIC programs are executed
while motion movements are executed.
One connection
The parameters and functions inside the Drives on the MECHATROLINK-II
and EtherCAT network are fully accessible from the Ethernet connection.
One minute
Trajexia Studio includes advanced debugging tools, including trace and
oscilloscope functions, to ensure efficient operation and minimum downtime.
The Servo Drives, Inverters and I/Os connected to the MECHATROLINK-II
and EtherCAT motion bus are automatically identified and configured,
allowing you to set up your system in minutes.
3.1.3
This manual
This Hardware Reference Manual gives the dedicated information for:
•
The description, connections and use of the Trajexia units
•
The description, connections and use of the MECHATROLINK-II slaves
•
The description, connections and use of the EtherCAT slaves
•
A detailed philosophy of the system design to obtain the best results for
Trajexia
Note
Trajexia Studio and CX-Motion Pro are the same software.
Trajexia Studio is supplied standalone where CX-Motion Pro is
part of the CX-One automation suite.







































































