





























Hardware reference
HARDWARE REFERENCE MANUAL
221
Revision 5.0
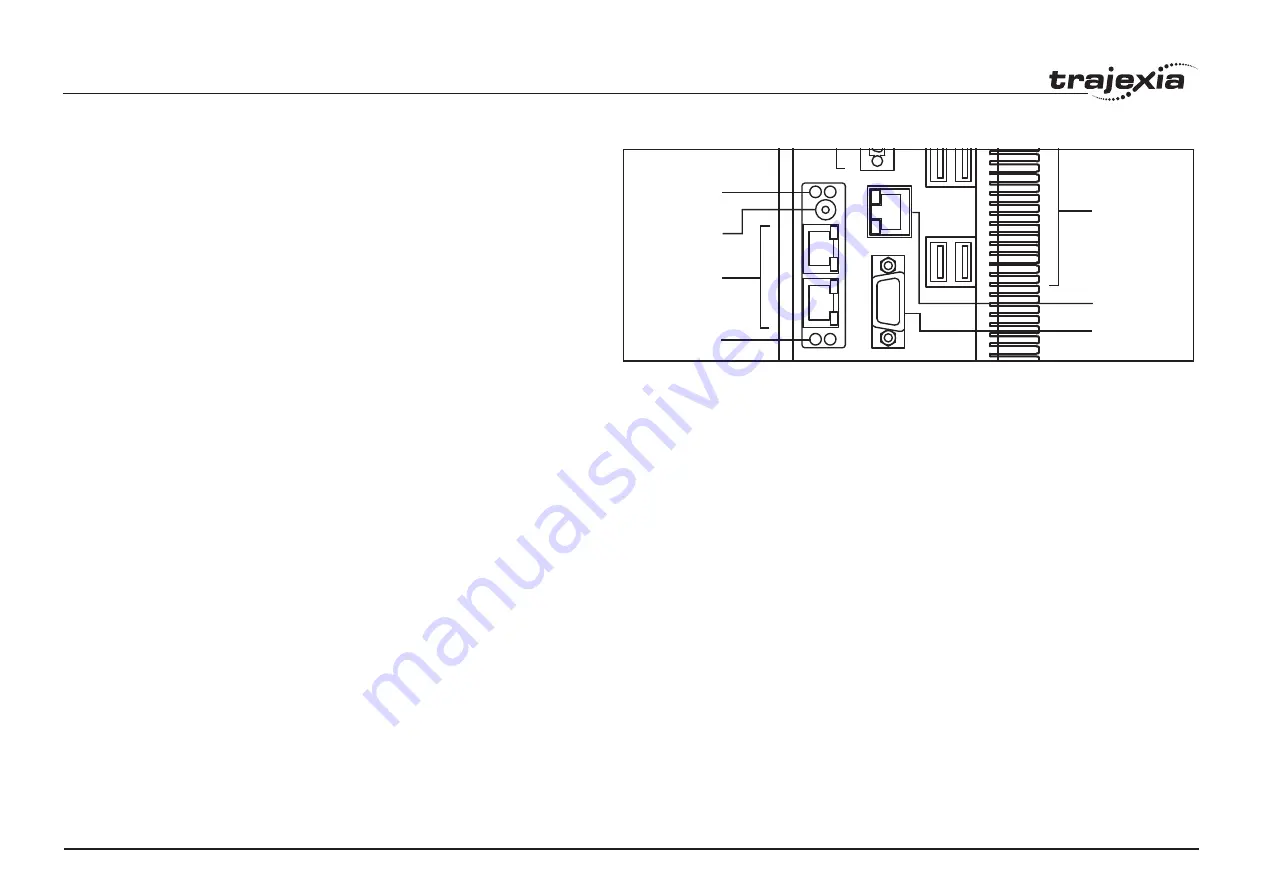
Rotary switches
fig. 119
Set the address selector of the slave unit to the required node address by
using the rotary switch (11).
The setting range for the node address switch is 1 to 9 and will result in node
address 1001 to 1009.
When the rotary switch is set to 0, the node address will be assigned
automatically, starting from 1000, depending on the position in the network.
PDO Mapping
The TJ2-MC__ will communicate to the FZM1 Vision Sensor by mapping the
Command, Response and Output areas in VR memory. The VR locations to
be used need to be configured after initializing the EtherCAT network, by
using a function of the ETHERCAT command.
(12)
(4)
(5)
(10)
(10)
(6)
(11)
Type
System command
Syntax
ETHERCAT(function, unit_number, address, VR_start_RxPDO,
VR_length_RxPDO, VR_start_TxPDO, VR_length_TxPDO)
Description
Command to control and access the EtherCAT network and its functions.
Notes:
•
This command waits for the response of the device so, its execution is
slow and the time variable. Do not use this command together with other
commands that require quick execution.
•
The
ETHERCAT
command returns -1 (
TRUE
) on success and 0
(
FALSE
) on failure.







































































