














EDH0162En1040 – 05/99
II
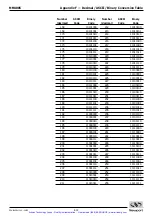
MM4005
Command List — Alphabetical
Command
Description
IMM PGM MIP
Command
Description
IMM PGM MIP
AB
Abort motion
xx
AC
nn
Set acceleration
AD
nn
Define the maximum allowed angle of discontinuity
xx
AM
nn
Set analog input mode
AP
Abort program
xx
AQ
nn
Axis positions acquisition
xx
AS
nn
Affect string
AT
Tell the element number under execution
xx
AX
Assign a physical axis as X geometric axis
xx
AY
Assign a physical axis as Y geometric axis
xx
BA
[nn]
Set backlash compensation
CA
nn
Define sweep angle and build an arc of circle = ƒ (CR, CA)
[xx]
CB
[nn]
Clear I/O outputs bits
xx
CD
nn
Set cycle value and activate periodic display mode
CM
[nn]
Change communication mode
xx
CP
Compile program
CR
nn
Define radius for anarc of circle = ƒ (CR, CA)
xx
CS
nn
Concatenate two strings
CX
nn
Define X position to reach with an arc of circle = ƒ (CX, CY)
CY
nn
Define Y position to reach and build an arc of circle
= ƒ (CX, CY)
xx
DA
pp
Read desired acceleration
[xx]
DF
Read following error
[xx]
DH
Define home
xx
DL
Define label
xx
DM
Read manual velocity
xx
DO
Read home search velocity
[xx]
DP
Read desired position
xx
DS
[nn]
Display strings on screen
xx
DV
pp
Read desired velocity
xx
DY
nn
Display a variable
ED
nn
Display program error
EL
Erase the last element of trajectory
xx
EO
nn
Automatical execution on power on
xx
EP
nn
Edition of program
ET
Execution of trajectory
xx
EX
[nn]
Execute a program
FA
nn
Define the tangent angle for the first point
xx
FB
[aa]
Label function key
FC
Clear function key line
FD
Display function keys
xx
FE
nn
Set maximum following error
xx
FF
nn
Set maximum master-slave following error
FT
nn
Set output frequency
GQ
nn
Set global trace mode
xx
GR
nn
Set master-slave reduction ratio
[xx]
IE
nn
If I/O input is equal
xx
JL
Jump to label
KC
Abort command line
xx
KD
nn
Set derivative gain
xx
KI
nn
Set integral gain
xx
KP
nn
Set proportional gain
xx
KS
nn
Set saturation level of integral factor
in position loop PID corrector
xx
LP
List program
xx
LT
Extended list of the trajectory
LX
nn
Define X position and build a line segment
= ƒ (LX, tangent)
LY
nn
Define Y position and build a line segment
= ƒ (LY, tangent)
MC
Set manual mode
[xx]
MF
Motor OFF
xx
MH
nn
Set manual velocity
ML
Set local mode
MO
Motor ON
MP
Download EEPROM to RAM
MR
Set remote mode
[xx]
MS
Read motor status
xx
MT
nn
Move to travel limit switch
xx
MV
+ or -
Infinite movement
MX
nn
Define X position for a line segment = ƒ (MX, MY)
MY
nn
Define Y position and build a line segment = ƒ (MX, MY)
NB
nn
Set trajectory element where the generation of pulses starts
NE
nn
Set trajectory element where the generation of pulses ends
NI
nn
Set step (curvi-linear distance) between
synchronisation pulses
NN
nn
Set number of synchronisation pulses to generate
xx
NP
nn
Set decimal digits number of position display
NQ
Read global acquisition nr.
NS
Allow generation of pulses on interpolation
NT
Start definition of a new trajectory
xx
OA
nn
Set home search acceleration
[xx]
OE
nn
Test I/O output
xx
OH
nn
Set home search high velocity
xx
OL
nn
Set home search low velocity
[xx]
OR
[nn]
Search for home
xx
PA
nn
Move to absolute position
xx
PB
nn
Set start position of generation of pulses of synchronisation
xx
PE
nn
Set end position of generation of pulses of synchronisation
xx
PI
nn
Set step of generation of pulses of synchronisation
xx
PR
nn
Move to relative position
xx
PS
pp
Allow generation of pulses on motion
xx
PT
nn
Calculate necessary time for axis displacement
[xx]
PW
Save parameters
QP
Quit program mode
QW
Save general parameters
[xx]
RA
Read analog input
[xx]
RB
Read I/O input
RD
Disable display refresh
RE
Enable display refresh
[xx]
RO
Read I/O output
RP
[nn]
Repeat command line
RQ
nn
Generate service request (SRQ)
RS
Reset controller
[xx]
SB
[nn]
Set I/O output bits
xx
SC
[nn]
Set control loop type
SD
nn
Speed scaling
SE
Start synchronized motion
xx
SF
name Set axis mechanical motion device
xx
SH
nn
Set home preset position
xx
SL
nn
Set left travel limit
SM
Save program
xx
SN
name Set axis displacement units
SO
[nn]
Set I/O output byte
SP
[nn]
Set trace sample rate
SQ
[nn]
Set global sample rate
xx
SR
nn
Set right travel limit
xx
SS
np
Set master-slave mode
[xx]
ST
Stop motion
xx
SY
nn
Axis synchronization
xx
TA
Read motion device
TB
[aa]
Read error message
xx
TC
Read control loop type
TD
Read error line of program
TE
Read error code
xx
TF
Read filter parameters
[xx]
TG
[nn]
Toggle I/O output bits
[xx]
TH
Read theoretical position
xx
TL
Read left travel limit
xx
TM
nn
Set trace mode
xx
TN
Read displacement units
[xx]
TP
Read actual position
[xx]
TQ
[nn]
Read global trace data
xx
TR
Read right travel limit
TS
Read controller status
[xx]
TT
Read trace data
xx
TU
Read encoder resolution
TX
Read controller activity
TX1
Read controller extended status
xx
TY
Read a variable
[xx]
UF
Update servo filter
[xx]
UH
Wait for I/O high
[xx]
UL
Wait for I/O low
xx
VA
nn
Set velocity
xx
VB
nn
Set base velocity (Stepper motor only)
VE
Read controller version
VS
nn
Define the vector acceleration on trajectory
(trajectory acceleration)
VV
nn
Define the vector velocity on trajectory (trajectory velocity)
WA
[nn]
Wait
WE
End While loop
xx
WF
Wait for function key
xx
WG
[nn]
While variable is greater
xx
WH
[nn]
While I/O input is equal
WI
nn
Wait for a trajectory (curvi-linear) length
WK
[aa]
Wait for key
xx
WL
[nn]
While variable is less
WN
nn
Wait for a element of trajectory
xx
WP
nn
Wait for position
[xx]
WS
[nn]
Wait for motion stop
WT
[nn]
Wait
xx
WY
[nn]
While variable is different
XA
Tell the current maximum allowed angle of discontinuity
xx
XB
Read backlash compensation
xx
XD
Read derivative gain factor
XE
Tell the last element
xx
XF
Read maximum following error
xx
XH
Read home preset position
xx
XI
Read integral gain factor
xx
XL
nn
Delete one line of program
XM
Read available memory
XN
Read number of acquisitions
xx
XP
Read proportional gain factor
XQ
Read global sample rate
XS
Read trace sample rate
XT
Tell number of elements in the trajectory
XU
nn
Tell the vector acceleration on trajectory
(trajectory acceleration)
XV
nn
Tell the vector velocity on trajectory
(trajectory velocity)
[xx]
XX
Erase program
xx
YA
[nn]
Add to variable
xx
YB
Negate variable
xx
YC
nn
Add variables
xx
YD
nn
Divide variables
xx
YE
[nn]
If variable is equal
xx
YF
nn
Scale variable
xx
YG
[nn]
If variable is greater
xx
YK
Read key to variable
xx
YL
[nn]
If variable is less
xx
YM
nn
Multiply variables
xx
YN
[nn]
If variable is different
xx
YO
nn
Send a value to an user analog port
xx
YP
nn
Set theoretical position in variable
xx
YQ
nn
Set current position in variable
xx
YR
nn
Read a value from an user analog port and affect variable
xx
YS
[nn]
Initialize variable
xx
YV
Read value from keyboard in a variable
xx
YW
Wait and read key
xx
YY
nn
Copy variable
[xx]
ZP
Zero position
[xx]
ZT
[nn]
Read Axis/General parameters configuration
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































