





























EDH0162En1040 – 06/99
4.32
MM4005
Motion Control Tutorial
The driver amplifies the standard ±10 V control signal to cover the motor’s
nominal voltage range while also supplying the motor’s nominal current.
This type of driver is used mostly in low cost applications where following
error is not a great concern. The controller does all the work in trying to
minimize the following error but load variations make this task very diffi-
cult.
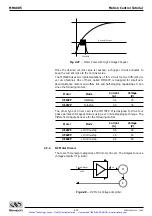
The second type of DC motor driver is the current driver, also called a
torque driver (Fig. 4.9).
Fig. 4.49
— DC Motor Current Driver.
In this case, the control signal voltage defines the motor current. The dri-
ver constantly measures the motor current and always keeps it proportion-
al to the input voltage. This type of driver is usually preferred over the
previous one in digital control loops, offering a stiffer response and thus
reduces the dynamic following error.
But, when the highest possible performance is required, the best choice is
always the velocity feedback driver. This type of driver requires a tachome-
ter, an expensive and sometimes difficult to add device (Fig. 4.50).
Fig. 4.50
— DC Motor Velocity Feedback Driver.
The tachometer, connected to the motor’s rotor, outputs a voltage directly
proportional with the motor velocity. The circuit compares this voltage
with the control signal and drives the motor so that the two are always
equal. This creates a second closed loop, a velocity loop. Motions per-
formed with such a driver are very smooth at high and low speeds and
have a smaller dynamic following error.
General purpose velocity feedback drivers have usually two adjustments:
tachometer gain and compensation (Fig. 4.51).
M
T
E
V = Velocity
Control Signal
±
10 V
M
E
In
Control Signal
±
10 V
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com