





























RC40 Control manual
68
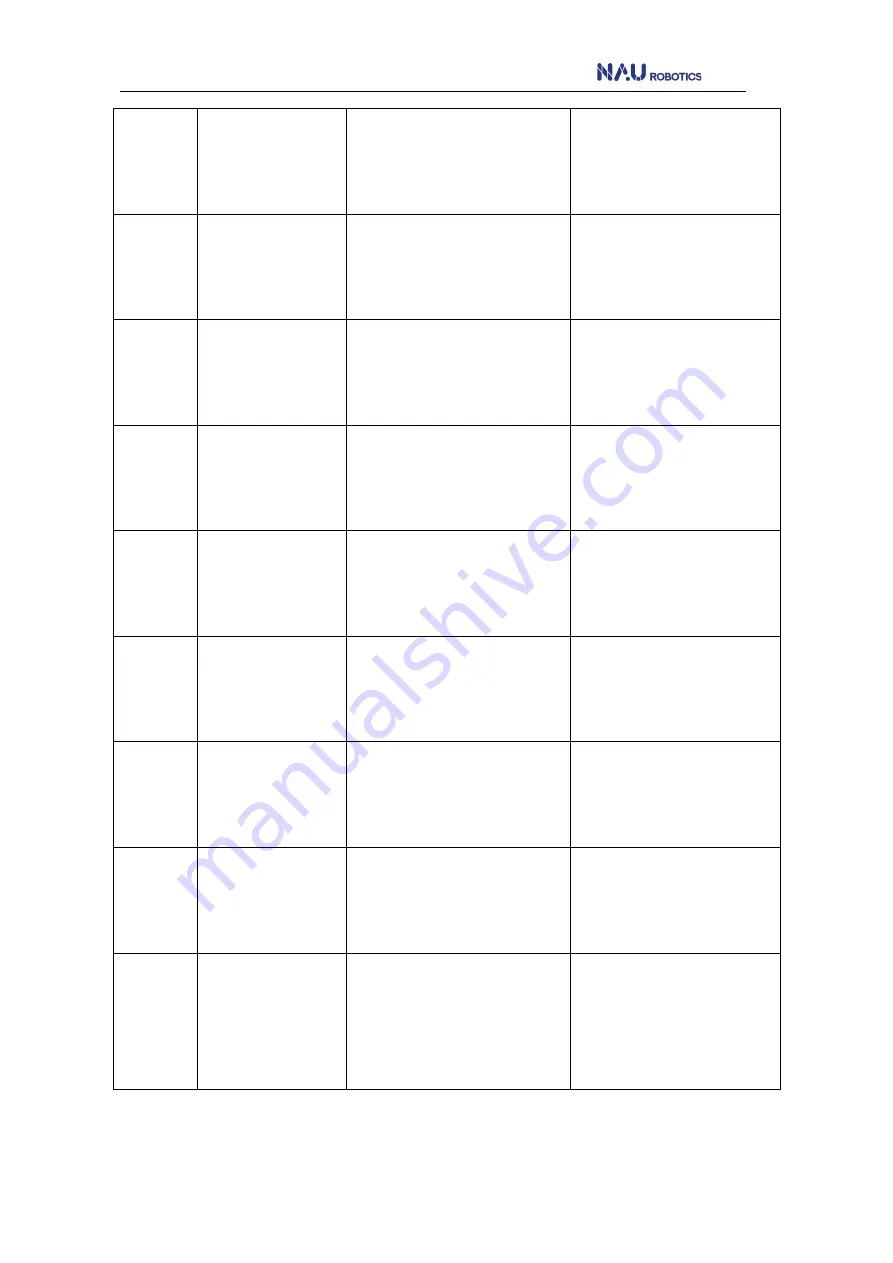
e0x0FA1
J2 speed limit
trigged
The target velocity of the J2
axis exceeded the maximum
speed limit of the J2 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA2
J3 speed limit
trigged
The target velocity of the J3
axis exceeded the maximum
speed limit of the J3 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA3
J4 speed limit
trigged
The target velocity of the J4
axis exceeded the maximum
speed limit of the J4 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA4
J5 speed limit
trigged
The target velocity of the J5
axis exceeded the maximum
speed limit of the J5 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA5
J6 speed limit
trigged
The target velocity of the J6
axis exceeded the maximum
speed limit of the J6 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA6
J7 speed limit
trigged
The target velocity of the J7
axis exceeded the maximum
speed limit of the J7 joint.
Lower robot speed,
acceleration or
deceleration ;
e0x0FA7
R axis speed limit
trigged
Additional axis 1 target speed
exceeds maximum speed limit
Lower robot speed,
acceleration or
deceleration ;
e0x0FA8
S axis speed limit
trigged
Additional axis 2 target speed
exceeded the maximum
speed limit
Lower robot speed,
acceleration or
deceleration ;
e0x1001
The emergency
stop button was
pressed
The Emergency stop button
connected to the Emergency
port of the controller panel is
pressed;
Spin out the emergency
stop button, or check the
hardware connection