



























42
3 SIGNALS AND WIRING
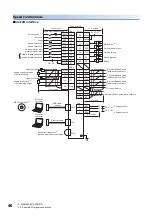
3.2 Example I/O signal connections
Source I/O interface
Precautions
• For notes, refer to the notes in the following section.
20
EM2
2
19
12
LSP
DOG
LSN
CN3
*11
*4
CN3
*11
13
MBR
9
INP
15
ALM
6
LA
16
LAR
7
LB
17
LBR
8
LZ
18
LZR
11
LG
DOCOM
3
CN5
MO1
MO2
3
LG
1
2
SD
*2
*6
TPR1
10
1
TPR2
DICOM
5
CN1A
CN1B
RA1
RA2
RA3
CN8
DC ± 10 V
DC ± 10 V
MR-J3USBCBL3M
CN6
*12
MR Configurator2
*5
+
Servo amplifier
10 m or less
10 m or less
24 V DC
*9*14
Main circuit power supply
*7
Forced stop 2
*3
Forward rotation stroke end
Electromagnetic brake
interlock
*13
Reverse rotation stroke end
In-position
Proximity dog
*16
Malfunction
*10
24 V DC
*9*14
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Encoder Z-phase pulse
(differential line driver)
Control common
Personal computer
Plate
USB cable
2 m or less
(option)
Analog monitor 1
Short-circuit connector
*8
(Packed with the servo amplifier)
Analog monitor 2
2 m or less
Network
Network
Touch probe1
*15
Touch probe2
*15
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......







































































