




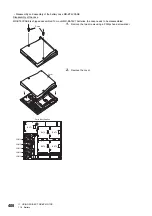
























12 USING A FULLY CLOSED LOOP SYSTEM
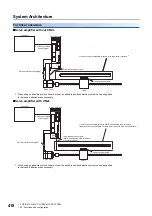
12.2 Functions and configuration
417
12
Operation mode and load-side encoder combinations
A fully closed loop system can be used in the position modes described below.
*1 Can be used with servo amplifiers that have a CN2L connector. If servo amplifiers do not have a CN2L connector, [AL. 070] will occur.
For servo amplifiers without a CN2L connector, use two-wire type encoder cables. Note that four-wire type serial interface-
compatible encoders and A/B/Z-phase pulse train interface-compatible encoders cannot be used.
Load-side encoder
[Pr. PA01.1_Operation mode selection]
"0"
Standard control mode
"4"
Linear servo motor
control mode
"6"
Direct drive motor
control mode
Linear encoder
[AL. 037.2]
Rotary servo motor manufactured by Mitsubishi Electric
[AL. 037.2]
Direct drive motor manufactured by Mitsubishi Electric
[AL. 01A.3]
[AL. 037.2]
[AL. 01A.3]
A/B/Z-phase differential output rotary encoder
[AL. 037.2]
[AL. 01A.3]
Summary of Contents for Melservo-J5 MR-J5 Series
Page 2: ......
Page 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Page 445: ......







































































