





























- 30 -
6.DESCRIPTION
OF
BASIC
FUNCTION DRIVE COMMANDS
AND
OPERATION
SEQUENCES
Execute each command to the port (refer to 4-1.) of the axis to which the command is executed.
In the following, a description is give about the X axis MCC05v2. The same is also applicable to the Y axis,
the Z axis and A axis.
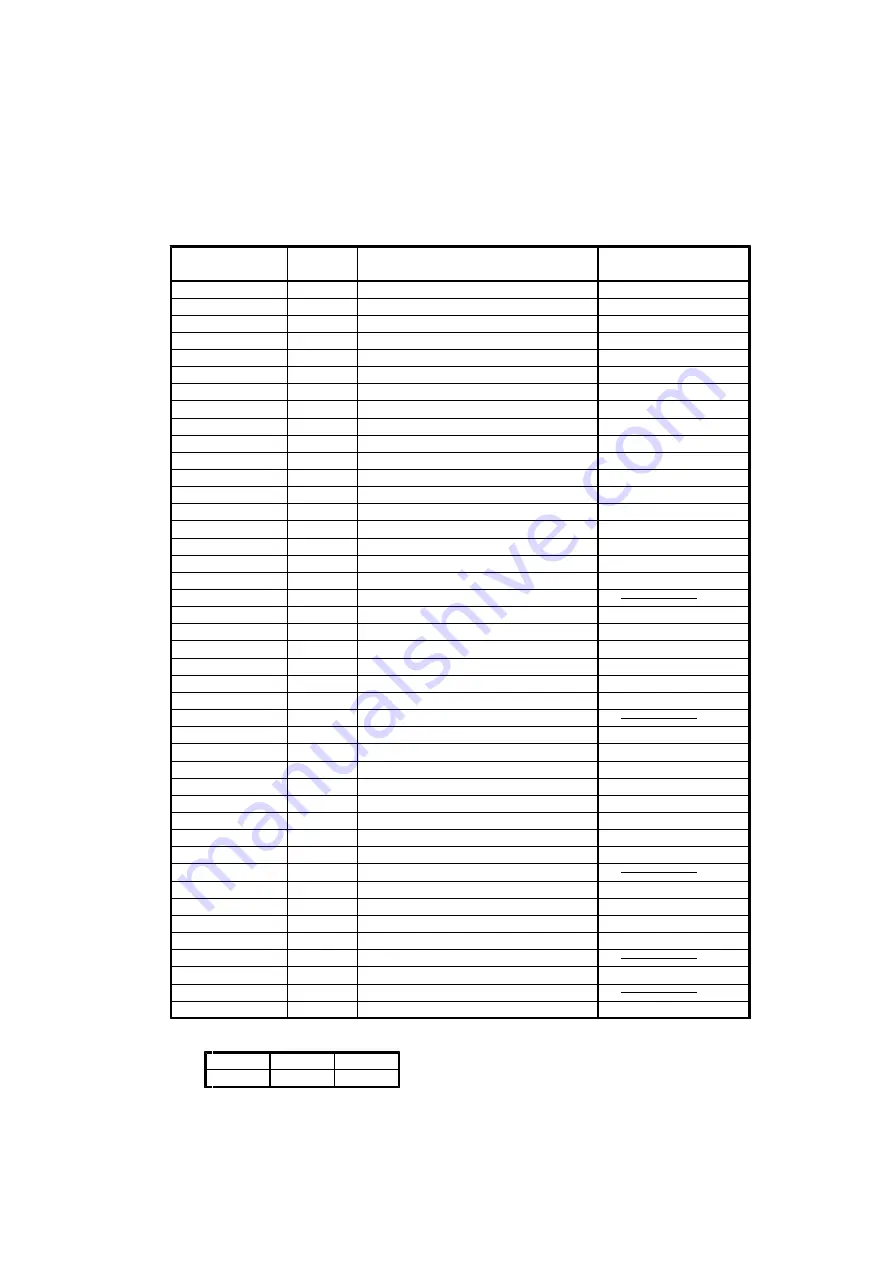
6-1. Basic Function DRIVE Command Table
The mark * denotes a command accompanied by pulse output.
D D D D D D D D
HEX C0DE
COMMAND NAME
Execution time
7
6
5
4
3
2
1
0
0 0 0 0 0 0 0 0
00
NO OPERATION
MAX
20μs
0 0 0 0 0 0 0 1
01
SPEC INITIALIZE1
MAX
1.2ms(Note1)
0 0 0 0 0 0 1 0
02
PULSE COUNTER INITIALIZE
MAX
25μs
0 0 0 0 0 0 1 1
03
ADDRESS INITIALIZE
MAX
30μs
0 0 0 0 0 1 0 0
04
ADDRESS READ
MAX
25μs
0 0 0 0 0 1 0 1
05
SERVO RESET
MAX
11ms
0 0 0 0 0 1 1 0
06
RATE SET
MAX
60μs(Note1)
0 0 0 0 0 1 1 1
07
LSPD SET
MAX
95μs(Note1)
0 0 0 0 1 0 0 0
08
HSPD SET
MAX
85μs
0 0 0 0 1 0 0 1
09
DFL COUNTER INITIALIZE
MAX
25μs
0 0 0 0 1 0 1 0
0A
SET DATA READ
MAX
35μs
0B~0F
Setting is disabled.
(Note3)
*
0 0 0 1 0 0 0 0
10
+JOG
(Note2)
*
0 0 0 1 0 0 0 1
11
-JOG
(Note2)
*
0 0 0 1 0 0 1 0
12
+SCAN
(Note2)
*
0 0 0 1 0 0 1 1
13
-SCAN
(Note2)
*
0 0 0 1 0 1 0 0
14
INCREMENTAL INDEX
(Note2)
*
0 0 0 1 0 1 0 1
15
ABSOLUTE INDEX
(Note2)
16~17
Setting is disabled.
18~19
Setting is disabled.
(Note3)
0 0 0 1 1 0 1 0
1A
CSPD SET
MAX
55μs
0 0 0 1 1 0 1 1
1B
OFFSET PULSE SET
MAX
20μs
0 0 0 1 1 1 0 0
1C
ORIGIN DELAY SET
MAX
25μs
0 0 0 1 1 1 0 1
1D
ORIGIN FLAG RESET
MAX
25μs
*
0 0 0 1 1 1 1 0
1E
ORIGIN
(Note2)
0 0 0 1 1 1 1 1
1F
Setting is disabled.
20~5F
Setting is disabled.
(Note3)
0 1 1 0 0 0 0 0
60
SRATE SET
MAX 150μs
0 1 1 0 0 0 0 1
61
SLSPD SET
MAX 150μs
0 1 1 0 0 0 1 0
62
SHSPD SET
MAX 150μs
0 1 1 0 0 0 1 1
63
SSRATE ADJUST
MAX 100μs
0 1 1 0 0 1 0 0
64
SERATE ADJUST
MAX 100μs
0 1 1 0 0 1 0 1
65
SCSPD1 ADJUST
MAX 100μs
0 1 1 0 0 1 1 0
66
SCSPD2 ADJUST
MAX 100μs
67~6F
Setting is disabled.
*
0 1 1 1 0 0 0 0
70
+ S-RATE SCAN
(Note2)
*
0 1 1 1 0 0 0 1
71
- S-RATE SCAN
(Note2)
*
0 1 1 1 0 0 1 0
72
S-RATE INCREMENTAL INDEX
(Note2)
*
0 1 1 1 0 0 1 1
73
S-RATE ABSOLUTE INDEX
(Note2)
74~E1
Setting is disabled.
1 1 1 0 0 0 1 0
E2
ERROR STATUS READ
MAX 25μs
E3~F1
Setting is disabled.
F2~F6
Setting is disabled.
(Note3)
Note1: When URATE ≠ DRATE is specified, the execution time as follows.
L-TYPE
M-TYPE
H-TYPE
MAX100ms
MAX 35ms
MAX 15ms
Note2: The execution time cannot be specified. Refer to Chapter 12. Timing.
Note3: Applied function DRIVE commands are assigned.
For details, refer to the User's Manual [Applied Functions Part].
Summary of Contents for C-875
Page 98: ... 98 2 M TYPE 3 H TYPE ...







































































