





























Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
39
10.3.3.
"Step", "Forward", "Back" function confirmation and correction track
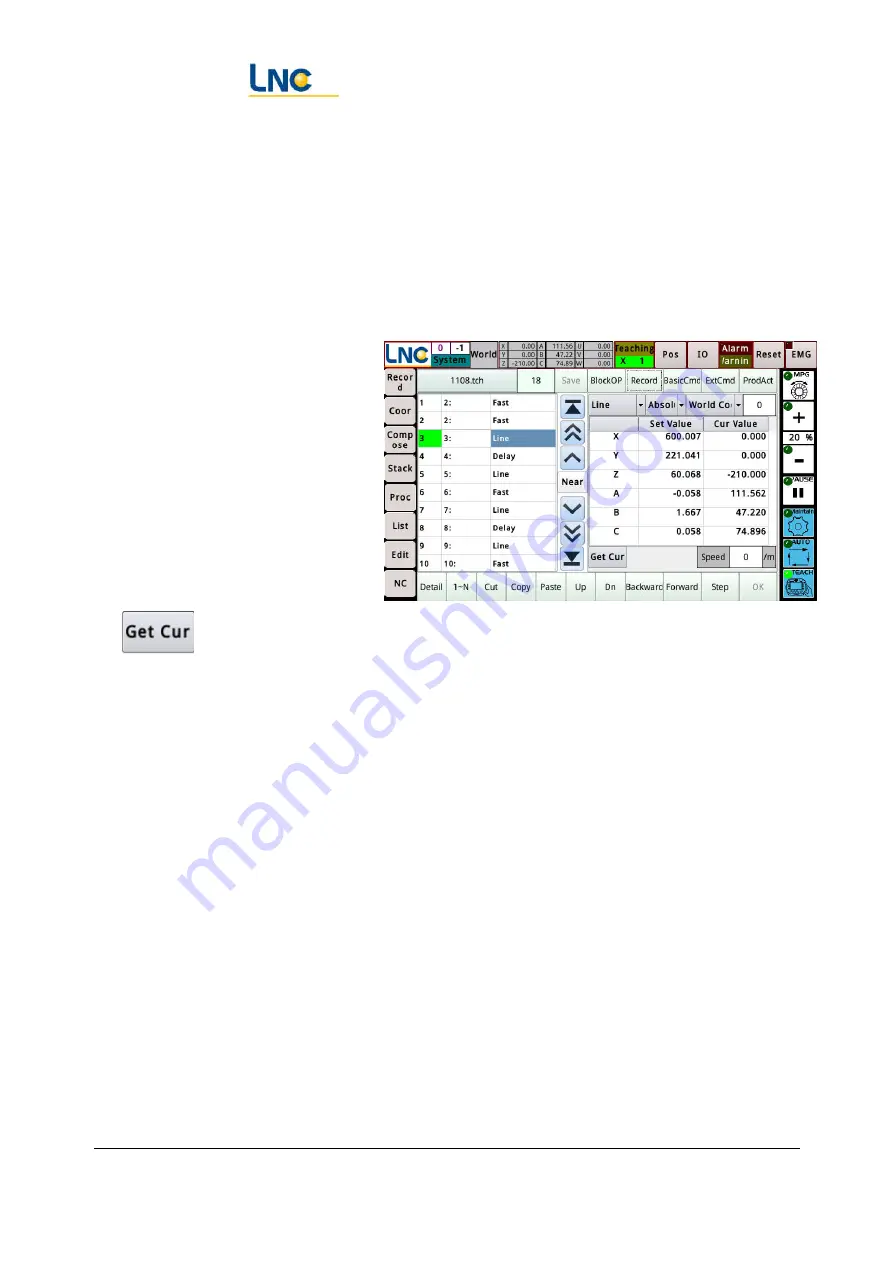
1.
The robot can be reached on the
trajectory by pressing the Step to
execute the selected command
line.
2.
Pressing forward and back allows
the robot to move along the
trajectory to the next command
point.
3.
If the trajectory is deviated, you
can adjust the position, then press
and archive, then continue to use the Forward and Back to test to correct the
trajectory.
10.3.4.
Handwheel run test
1.
Cut to automatic mode and select the handwheel.
2.
Press Start to rotate the handwheel to let the program run at the speed of the handwheel.
3.
If you think that the program does not work as expected, you can reset the program and then
switch to manual mode to adjust the program.
4.
After the adjustment is completed, execute the single step to the command line that the test
just interrupted.