





























3.8 C
ontrol and functions of Input and output signals of Remote I/O Mode
209
3.8.4 Direct Position Specification (Solenoid Valve Mode 2) = Operation of PIO
Pattern 5
The start signal is provided for every position number. Only turning ON the relevant input signal
according to the table shown below allows the operation based on the data in the target
position number to be performed. The operation mode is called the solenoid valve mode
because solenoid valves can directly drive air cylinders. At invasion of the actuator into the
positioning width set for each position, the output signal is turned ON in the operation of any
position number or manual operation of the actuator in servo OFF status as if a sensor were
installed.
Positioning and speed change during operation are possible. Their control methods are the
same as those of other patterns.
Caution: This pattern does not allow pressing and pitch feed.
[1] Home return (ST0, HEND)
The I/O of PIO varies as shown in the table below depending on the position number before
home return.
Position No.
Input
Output
0 ST0 LS0
1
ST1
⇒
JOG+
LS1
2
ST2
⇒
Invalid
LS2
⇒
Invalid
Before home return, start signal ST0 works as JOG- moving to the home return direction while
it is set to ON and ST1 works as JOG+ while it is set to ON. By using this function, move the
actuator to a position at which home return can be done safely. The speed of ST1 is the home
return speed.
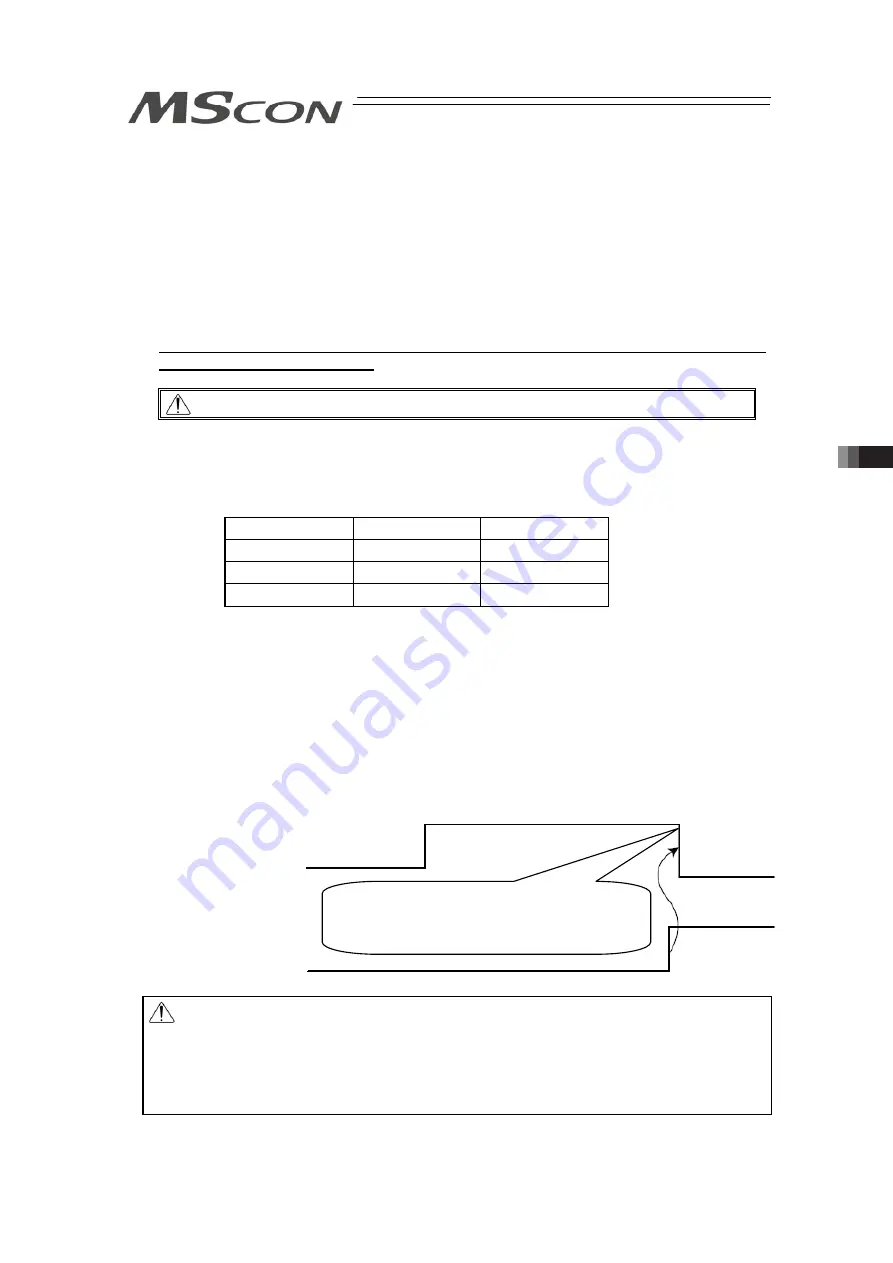
After the home return is fully prepared, turn the ST0 signal ON to start the home return. At the
completion of the home return, home return complete signal HEND is turned ON. Turn the ST0
signal OFF if HEND is turned ON. Home-Return Complete Signal HEND will be kept ON once it
is turned ON even if getting off the home position as unless the home position gets lost.
If a certain home positioning precision is required, Set “Position” of position No.0 to 0 mm and
the ST0 signal is not changed by the HEND signal to remain ON. After the home return is
completed, positioning is provided for position No.0. [Refer to [3] Positioning in this chapter]
Warning: (1) Use this pattern with Parameter No.27 “Move command type” set to “0”
(factory setting). When Parameter No.27 is set to “1”, the home return is
started as soon as the ST0 signal is turned ON and the operation cannot be
stopped even if ST0 is turned OFF.
(2) If “Position” in position No.0 is set to other than 0mm, the operation is
continued without change to provide positioning after home return.
Home Return Signal
ST0
(PLC
→
MSCON)
If a certain precision is required. Set
“Position” of position No.0 to 0 mm and
ST0 is not chaged by HEND to remain ON.
Homing Completion Signal
HEND
(MSCON
→
PLC)
ME0306-2A
Summary of Contents for MSCON
Page 1: ...MSCON Controller Instruction Manual Second Edition ...
Page 2: ......
Page 4: ...ME0306 2A ...
Page 8: ...ME0306 2A ...
Page 20: ...12 ME0306 2A ...
Page 28: ...20 ME0306 2A ...
Page 46: ...Chapter 1 Specifications Check 38 ME0306 2A ...
Page 240: ...3 11 Gateway status LED 232 ME0306 2A ...
Page 246: ...Chapter 4 Vibration Suppress Control Function 238 ME0306 2A ...
Page 290: ...Chapter 7 Parameter 282 ME0306 2A ...
Page 310: ...Chapter 8 Troubleshooting 302 ME0306 2A ...
Page 354: ...Chapter 9 Appendix 346 ME0306 2A ...
Page 358: ......
Page 359: ......







































































