





























4. CONFIGURATION OF EtherCAT CONNECTION
4-25
4.2.5 SoftMotion Axis setting
In this example, an Axis setting is configured.
• Repeat this action for each Axis according to your needs.
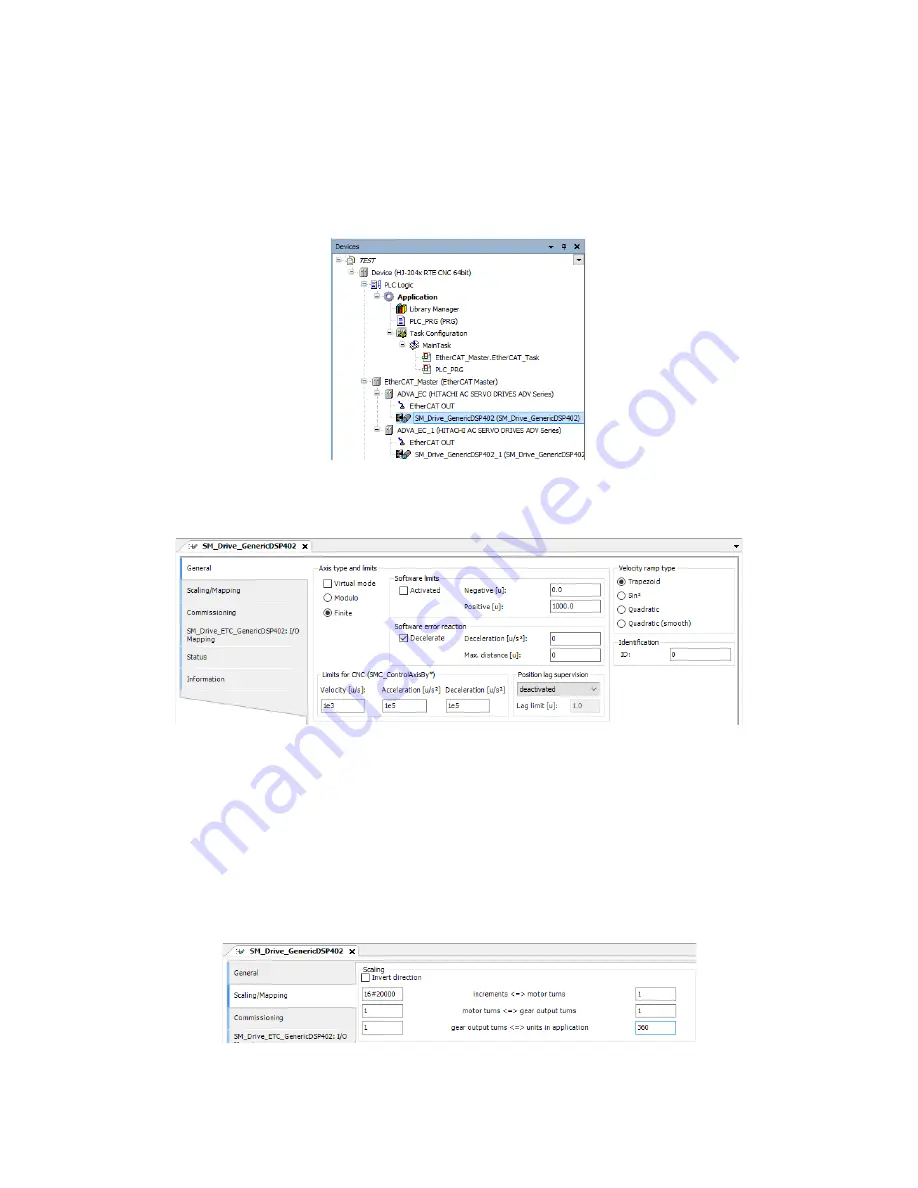
1. Double-click
SM_Drive_GenericDSP402 (SM_Drive_GenericDSP402)
in the
Devices
window to display a window for Axis configuration.
2. Click
General
, and configure
Axis type and Limits
and
Velocity ramp type
.
In this example, default values are used.
If CNC is used
If CNC is used in your program, the function block that starts with
“SMC_ControlAxisBy” must be used for the axis control. To use this function, you
must define the upper limits of the velocity, acceleration, and deceleration under
Limits for CNC (SMC_ControlAxisBy*)
in the above screen.
3. Click
Scaling/Mapping
to configure
Scaling
.
In the following setting example, 360 counts in the CODESYS program correspond to
one rotation of the motor. (This setting is for using a 17-bit encoder (16#0~16#1FFFF).)