





























152
Programming examples – Model helicopters
A glance at the menu ...
»Control adjust« (page 60)
E n t e r 9 C n t r 9
0 % + 1 0 0 % + 1 0 0 % 0 . 0 0 . 0
E n t e r 1 0 C n t r 1 0
0 % + 1 0 0 % + 1 0 0 % 0 . 0 0 . 0
E n t e r 1 1 f r e e
0 % + 1 0 0 % + 1 0 0 % 0 . 0 0 . 0
T h . L . 1 2 C n t r 7
0 % + 1 0 0 % + 1 0 0 % 0 . 0 0 . 0
o f f s e t - t r a v e l + - t i m e +
S Y M A S Y
A S Y
S Y M
S E L
s
S E L
… will show you that control 7 is assigned to input 12.
This input serves as the
throttle limiter
. It acts sole-
ly on output “6”, to which the throttle servo is connec-
ted. The slider, which is connected as standard to the
CH7 socket on the transmitter circuit board, is assig-
ned to the throttle limiter.
Just to remind you:
The throttle limiter does not control the throttle servo;
it just restricts the travel of this servo in the forward
direction, in accordance with the setting you select.
The throttle servo is usually controlled by the collecti-
ve pitch stick via the throttle curve you have program-
med. For more details of these functions please read
the sections on pages 62 and 92 of the manual.
Select the
ASY
fi eld in the “Travel” column, and incre-
ase the value in the inverse fi eld from 100% to 125%,
with the throttle limiter pushed fully forward.
This ensures that the throttle limiter cannot possibly
restrict the full throttle travel set by the collective pitch
stick when the model is in fl ight.
An additional transmitter control needs to be activated
in the menu ...
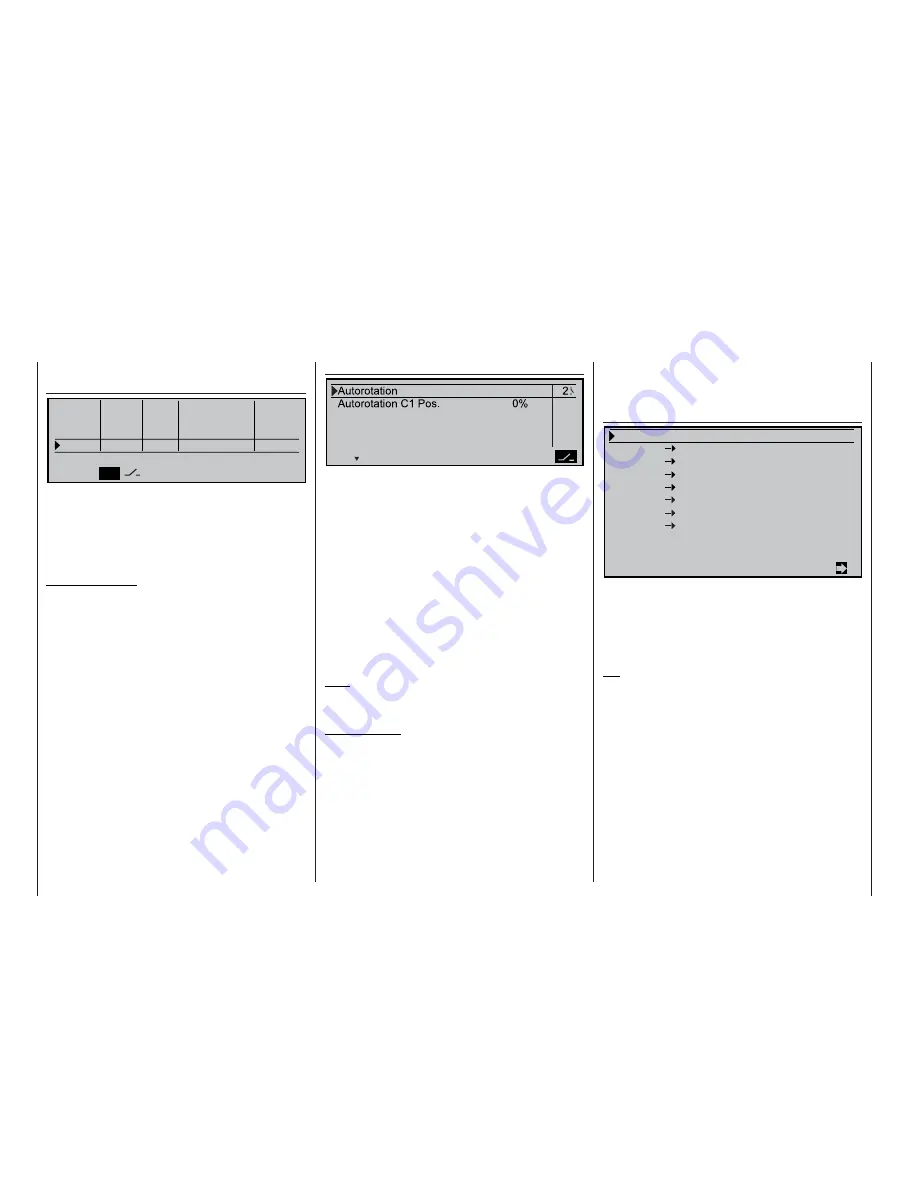
»Auxiliary switch« (page 75)
Even if you are a beginner to fl ying and are not yet
ready for this, it is advisable at least to defi ne the
auto-rotation switch, so that you have an “emergency
off” switch for the motor.
This is carried out in the sub-menu “Auto-rotation”:
press the rotary control briefl y and move one of the
ON / OFF switches (e.g. two-position switch, Order
No.
4160
) to the “ON” setting. On the right the switch
number (in our example “2”) appears, and this num-
ber will also identify the switch in the »
Switch dis-
play
« menu.
The AR switch should be located at a position on the
transmitter where you can easily reach it without let-
ting go of either stick, e.g. above the collective pitch
stick.
Note:
Please refer to the next page for more details on set-
ting up this “Emergency off switch”.
And another tip:
We recommend that you make it a routine matter to
assign all the switches a common “on” direction; then
a quick glance at the transmitter before fl ying will
soon reassure you that all switches are “off”.
If you wish, you could at this point move to other sub-
menus and assign fl ight phase switches, but our
simple programming example does not include such
refi nements.
You have now completed the basic settings at the
transmitter, i.e. the procedure which you will need to
use time and again when setting up new models.
The actual set-up for your specifi c helicopter is car-
ried out primarily in the menu ...
»Helicopter mixers« (page 90)
… where you will see the “
Pitch
” function in the very
fi rst line; a brief press on the rotary control will take
you to the corresponding sub-menu. Here you will fi nd
a graph of the collective pitch curve, which is initially
defi ned only by the three reference points “L” (low), “1”
and “H” (high); in most cases this will be all you need.
Tip:
We strongly advise that you initially set up your heli-
copter using just these three reference points; more
points complicate the whole business, and at present
are likely to be more trouble than they are worth.
The reference point for hovering should generally be
the mechanical centre point of the collective pitch
stick, as this position feels completely natural to most
pilots. You can, of course, set up the curve to loca-
te the hover at a different point, but please don’t be
tempted to do this unless you know exactly what you
are doing. Start by setting the collective pitch stick
to centre. Assuming that you previously adjusted the
servos in accordance with the manufacturer’s instruc-
tions, the servo output arms will now (usually) be at
right-angles to the servo case. If you have not already
P i t c h
= >
C h a n n e l 1 T h r o t t l e
= >
C h a n n e l 1 T a i l r o t .
= >
T a i l r o t .
T h r o t t l e
0 %
R o l l
T h r o t t l e
0 %
R o l l
T a i l r o t .
0 %
P i t c h a x . T h r o t t l e
0 %
P i t c h a x . T a i l r o t .
0 %
G y r o s u p p r e s s i o n
0 %
S w a s h p l a t e r o t a t i o n
0 %
t
Summary of Contents for MC-22S
Page 1: ...1 mc 22s GB mc 22s 3D Rotary Programming System Programming manual ...
Page 33: ...33 Digital trims ...
Page 55: ...55 Program description Base setup model ...
Page 77: ...77 Program description Flight phases ...
Page 89: ...89 Program description Mixers ...
Page 174: ...174 ...
Page 175: ...175 ...
Page 176: ...176 ...
Page 177: ...177 ...
Page 178: ...178 ...







































































