























L’utilisation des circuits électriques TBTS permet d’assurer l’isolation (protection
contre les contacts directs et indirects) selon EN 60204-1 (Équipement électrique
des machines, exigences générales). Le bloc d’alimentation 24 V doit répondre aux
exigences de la norme EN 60204-1 relative aux alimentations en courant continu
(comportement en cas de coupure de tension, etc.)
S’assurer que des ponts ou autres ne peuvent être parallèlement installés au
câblage de sécurité, en utilisant notamment une section de conducteur maximale
de 1,5 mm² ou des cosses appropriées munies de gaine d’isolation. Pour le bou-
clage de câble entre des appareils rapprochés, utiliser des cosses doubles.
Protection contre les décharges électrostatiques
Sur les connecteurs enfichables non affectés, il existe un risque d’endom-
magement par décharge électrostatique sur l’appareil ou d’autres parties de
l’installation. Avant la mise en place, mettre les éléments de l’installation à la terre
et utiliser un équipement de protection contre les décharges électrostatiques
(par ex. chaussures, bandes de mise à la terre, etc.)
6.2 Raccordement [X40]
Le module de sécurité CAMC-G-S1 possède une interface combinée pour la com-
mande et le message de retour via un connecteur enfichable [X40].
Connec-
teur
mâle
Broche
Désignation Valeur
Description
8
0 V
0 V
Potentiel de référence pour tension
d’alimentation auxiliaire
7
24 V
+24 V CC
Tension d’alimentation auxiliaire
(alimentation logique en 24 V CC du
contrôleur de moteur)
6
C2
–
Contact d’acquittement pour l’état “STO”
sur une commande externe
5
C1
4
0 V-B
0 V
Potentiel de référence pour STO-B.
3
STO-B
0 V / 24 V
Entrée de commande B pour la fonction STO
2
0 V-A
0 V
Potentiel de référence pour STO-A.
1
STO-A
0 V / 24 V
Entrée de commande A pour la fonction STO.
Fig. 3
Affectation connecteur [X40] (représentation du connecteur sur le module)
Pour assurer la fonction STO “Arrêt sécurisé”, le raccordement des entrées de
commande STO-A et STO-B doit s’effectuer à deux canaux via un câblage parallèle.
Cette connexion peut être par exemple un élément d’un circuit d’arrêt d’urgence
ou d’une configuration de porte de protection.
1
2
3
4
5
L230 V AC
N230 V AC
PE
24 V DC
T1
Festo CMMP-AS-C…-3A-M3
1 2 7 8 9
L1
PE
+2
4
V
GN
D
24
V
n
-X9
21
9
DI
N
4
DI
N
5
-X1
1
3
2 4
ST
O
-A
ST
O
-B
0V
-B
0V
-A
-X4
0
So
rt
ie
A
P
I
:
A
ct
iv
a
ti
o
n
d
'ét
ag
es
d
e
s
o
rt
ie
So
rt
ie
A
P
I
:
A
cti
v
a
ti
o
n
d
u
ré
g
u
la
te
u
r
Seuls les raccordements pertinents sont indiqués !
Sans détection des courts-circuits transversaux !
0 V DC
5 6
C1
C2
En
tr
é
e
AP
I
:
M
e
s
s
a
g
e
de
re
tour
s
é
cu
ri
té
T
1
S1
Émetteur
Récepteur
O
SSD
1
O
SSD
2
S1
S1
S1
Interrupteur
de sécurité
1
3
2
4
1
3
4
2
1
3
4
2
1
3
4
2
ou
ou
1
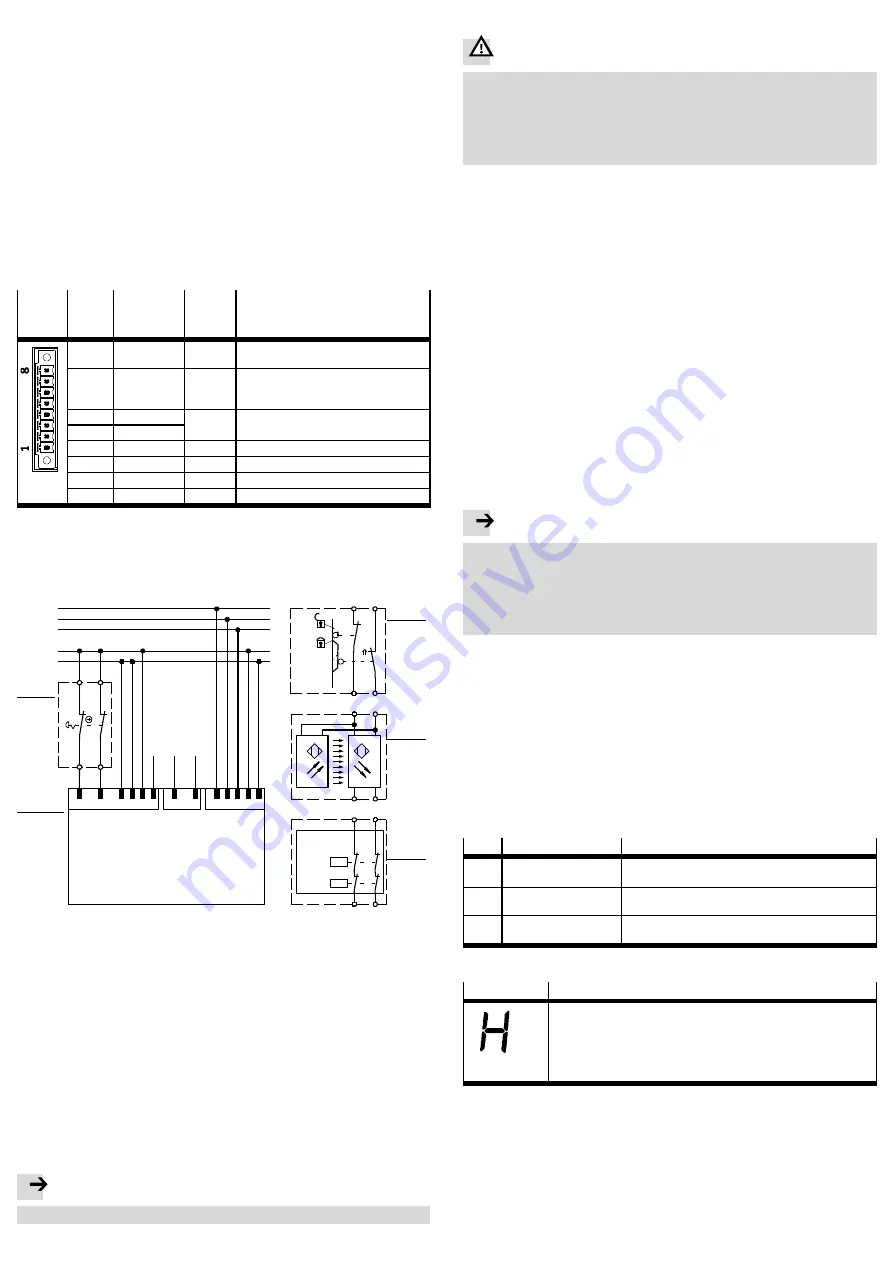
Contrôleur de moteur avec module
de sécurité (principaux
raccordements uniquement)
2
Interrupteur d’arrêt d’urgence
3
Porte de protection
4
Grille lumineuse
5
Interrupteur de sécurité
Fig. 4
Raccordement du module de sécurité CAMC-G-S1, exemple d’un
contrôleur de moteur CMMP-AS-…-M3 monophasé
Si une connexion conforme aux normes de sécurité n’existe pas (encore), installer
un module de commutation CAMC-DS-M1.
Si aucun module de micro-interrupteurs n’est disponible ou si la première mise en
marche du contrôleur de moteur s’effectue sans système de sécurité, le contrôleur
de moteur CMMP-AS-C…3A-M3 avec le module de sécurité CAMC-G-S1 et circuit
minimal peut être doté, conformément à la Fig. 4, d’un interrupteur d’arrêt
d’urgence (
2
).
Exécuter le circuit minimal des entrées STO-A/STO-B et 0 V-A/0 V-B de sorte à
devoir obligatoirement les retirer lorsque le circuit de sécurité définitif sera
installé.
Nota
Ne pas effectuer de pontage des fonctions de sécurité.
7
Mise en service
Avertissement
Perte de la fonction de sécurité !
Une fonction de sécurité manquante peut entraîner de graves et irréversibles
blessures, notamment en cas de mouvements incontrôlés des actionneurs reliés.
• N’utiliser le module de sécurité
– que s’il est monté et
– que si toutes les mesures de protection sont initiées.
• Valider la fonction de sécurité au terme de la mise en marche.
Un câblage défectueux, l'utilisation d'un module de sécurité inadéquat ou de
composants externes non sélectionnés en fonction de la catégorie de sécurité,
sont des causes de perte de fonction de sécurité.
• Évaluer les risques pour l’application et sélectionner le circuit et les composants
de manière appropriée.
7.1 Avant la mise en marche
Accomplir les étapes suivantes avant la mise en marche :
1. S’assurer que le module de sécurité est correctement installé.
2. Vérifier l’installation électrique (câble de raccordement, affectation du contact
Paragraphe 6). Tous les conducteurs de protection PE sont-ils raccordés ?
7.2 Réglage des interrupteurs DIP
Régler les interrupteurs DIP comme décrit dans la documentation Matériel
GDCP-CMMP-AS-M3-HW-... ou dans la documentation spécifique au bus de terrain.
7.3 Paramétrage avec l’outil FCT
Lors de la première mise en service ou en cas de remplacement par un type de
module différent (CAMC-DS-M1 ou CAMC-G-S3), une erreur impossible à valider se
déclenche. La validation de l'erreur s'effectue par la confirmation du remplace-
ment du module à l'aide du logiciel de paramétrage. Un cas de simple remplace-
ment du module (par un module de même type), une entrée est générée dans la
mémoire de diagnostic permanente.
7.4 Test fonctionnel
Nota
La fonction STO doit être validée après l’installation et les modifications de
l’installation.
Cette validation doit être documentée par l’opérateur de mise en route. Comme
aide à la mise en marche, des exemples de listes de vérification sont disponibles
dans la documentation GDCP-CAMC-G-S1-... contenue dans le CD joint au pré-
sent contrôleur de moteur.
8
Conditions d’utilisation
8.1 Obligations de l’exploitant
Vérifier le bon fonctionnement des dispositifs de sécurité à intervalles réguliers.
L’exploitant est tenu de définir le mode de contrôle et la durée des intervalles. Le
contrôle doit être effectué de sorte à prouver le fonctionnement irréprochable des
dispositifs de sécurité et de l’interaction entre tous les composants.
8.2 Maintenance et entretien
Le module de sécurité ne nécessite aucune maintenance.
9
Diagnostic et réparation
9.1 Témoin de l’état
LED
Désignation
Description
Arrêt
Sécurité défaillante
= État STO non activé
Le module de sécurité ou le contrôleur de moteur
n’enregistre aucune tension de service.
Vert
Sécurité défaillante
= État STO non activé
L’étage de sortie du contrôleur de moteur pour
l’alimentation du moteur peut être activé ou désactivé.
Jaune
Sûr
= État STO activé
L’étage de sortie du contrôleur de moteur pour
l’alimentation du moteur est coupé de manière sécurisée.
Fig. 5
Témoins LED sur le module de sécurité
Affichage
Description
“H” : le contrôleur de moteur est en “Arrêt sécurisé”.
Ceci n’équivaut pas à l’information relative à l’état de la fonction de sécurité
STO (Arrêt sécurisé). Cette dernière ne peut être lue que via la LED d’état du
module de sécurité.
Aucun affichage spécial n’est prévu pour l’“état non sécurisé”. Seuls sont
représentés les affichages normaux de l’état du contrôleur de moteur.
Fig. 6
Afficheur à sept segments sur le contrôleur de moteur







































































