





























EC590
Function parameters description
EC590
Function parameters description
-
99
-
-
100
-
Function Code
Parameter Name
Description
Any of F4-00 to F4-09
Sx function selection
Setting Range
Counter input
25
Any of F4-00 to F4-09
Sx function selection
Counting reset
26
Any of F5-00 to F5-05
Yx function selection
Set counting value reached
8
Any of F5-00 to F5-05
Yx function selection
Designated counting value
reached
9
Note
● For high pulse frequency, use terminal S5.
● You cannot allocate "Set counting value reached" function and "Designated
counting value reached" function to the same Y terminal.
● The counter keeps counting in the drive running/stop status. It stops counting
until the set counting value is reached.
● The counting value is retentive at power down.
● An automatic stop system can be implementing by connecting the output
counting value reached signal of Y to the stop input terminal.
5.8.3 Motor 2 Parameters
The drive supports driving two motors at different time. For the two motors, you can:
● Set motor nameplate parameters respectively
● Perform motor auto-tuning respectively
● Select V/F control or vector control respectively
● Set encoder-related parameters respectively
● Set parameters related to V/F control or vector control independently
You can select the desired motor parameter group in F0-24 or via a S terminal
1. Select the desired motor parameter group in F0-24.
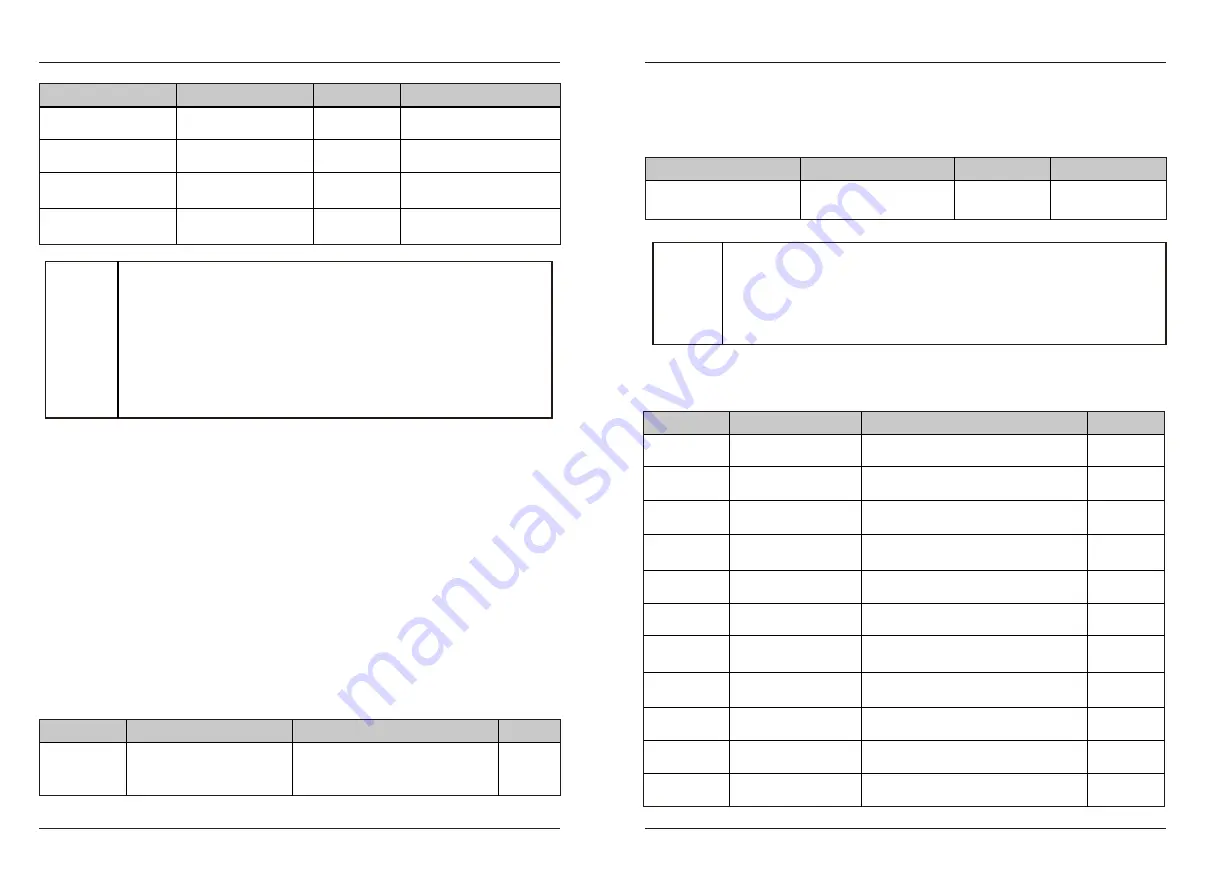
Function Code
Parameter Name
Default
F0-24
Motor parameter group
selection
Setting Range
0
0: Motor parameter group 1
1: Motor parameter group 2
2. Select the desired motor parameter group via a S terminal.
Set any S (F4-00 to F4-09) for function 41 "Motor selection". If the S is inactive, motor parameter
group 1 is selected. If the S is active, motor parameter group 2 is selected.
Function Code
Parameter Name
Description
Any of F4-00 to F4-09
Sx function selection
Setting Range
Motor selection
41
Note
●
If any of F4-00 to F4-09 is set for function 41 “Motor selection”, S terminal
overrides F0-24. If none of F4-00 to F4-09 is set for function 41 “Motor selection”,
motor selection is determined by F0-24.
●
Switchover of two groups of motor parameters is prohibited during drive
running. Otherwise, the drive detects Err41.
Function Code
Parameter Name
Default
A2-00
Motor type selection
Setting Range
0
0 to 1
A2-01
Rated motor power
Model
dependent
0.1 to 1000.0 kW
A2-02
Rated motor voltage
1 to 2000 V
A2-03
Rated motor current
0.01 to 655.35 (AC drive power ≤ 55 kW)
0.1 to 6553.5 (AC drive power > 55 kW)
A2-04
Rated motor frequency
0.01 to max. frequency
A2-05
Rated motor speed
1 to 65535
A2-06
Stator resistance
0.001 to 65.535 (AC drive power ≤ 55 kW)
0.0001 to 6.5535 (AC drive power > 55 kW)
A2-07
Rotor resistance
0.001 to 65.535 (AC drive power ≤ 55 kW)
0.0001 to 6.5535 (AC drive power > 55 kW)
A2-08
Leakage inductive
reactance
0.01 to 655.35 (AC drive power ≤ 55 kW)
0.001 to 65.535 (AC drive power > 55 kW)
A2-09
Mutual inductive
reactance
0.1 to 6553.5 (AC drive power ≤ 55 kW)
0.01 to 655.35 (AC drive power > 55 kW)
A2-10
No-load current
0.01 to F1-03 (AC drive power ≤ 55 kW)
0.1 to F1-03 (AC drive power > 55 kW)
Model
dependent
Model
dependent
Model
dependent
Model
dependent
Model
dependent
Model
dependent
Model
dependent
Model
dependent
Model
dependent







































































