

























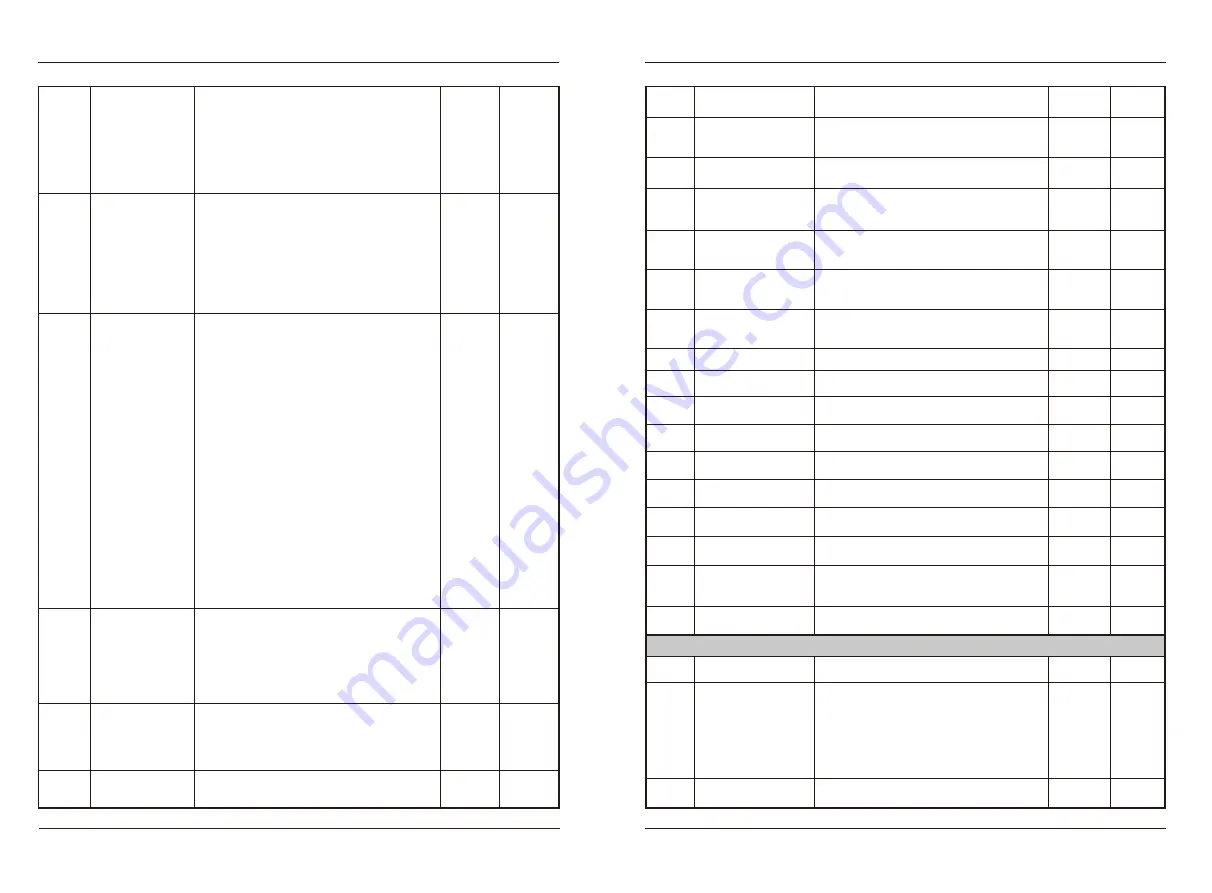
0℃ to 200℃
Motor overheat
protection threshold
F9-57
0
Judging time of bus
voltage recovering
from power dip
F9-62
F9-68
Overspeed detection
time
0.0s: Not detected
0.1 to 60.0s
F9-71
Power dip ride-through
gain Kp
40
0 to 100
FA-00
PID reference setting
channel
0: Set by FA-01 (PID digital setting)
1: AI1
2: AI2
3: Keyboard potentiometer
4: Pulse reference (S5)
5: Communication reference
6: Multi-reference
F9-48
F9-49
BIT0:Motor overload (Err11)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT1:Input phase loss (Err12)
BIT2
:
Output phase loss (Err13)
BIT3
:
Thousands: External fault (Err15)
BIT4
:
Communication
fault (Err16)
Fault protection
action selection 1
F9-47
Fault protection
action selection 2
Fault protection
action selection 3
F9-50
Fault protection
action selection 4
Frequency selection
for continuing
to run upon fault
0: Current running frequency
1: Frequency reference
2: Frequency upper limit
3: Frequency lower limit
4: Backup frequency upon abnormality
00000
☆
BIT0:Encoder fault (Err20)
0: Coast to stop
BIT1:EEPROM read-write fault
(Err21
)
0: Coast to stop
1: Stop according to the stop mode
BIT2
:
Reserve
BIT3
:
Motor overheat (Err45)
BIT4
:
Accumulative running
time reached(Err26)
BIT0:User-defined fault 1 (Err27)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT1:User-defined fault 2 (Err28)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT2
:
Accumulative power-on
time reached
(Err29)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT3
:
Load lost (Err30)
0: Coast to stop
1: Deceleration to stop
2: Continue to run at 7% of rated motor
frequency and restore to the frequency
reference if the load recovers
BIT4
:
PID feedback lost
during running (Err31)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT0:Too large speed feedback error
(
Err42)
0: Coast to stop
1: Stop according to the stop mode
2: Continue to run
BIT1:Motor overspeed (Err43)
BIT2
:
Initial position fault
(
Err51)
F9-54
F9-55
Backup frequency
upon fault
0.0% to 100.0%
(100.0% corresponds to F0-10.)
00000
☆
00000
☆
0000
☆
0
☆
100
.
0
%
☆
F9-56
Type of motor
temperature sensor
0: No temperature sensor
1: PT100
2: PT1000
0
☆
110℃
☆
F9-58
Motor overheat pro
-
warning threshold
0℃ to 200℃
F9-59
Power dip ride-through
function selection
0: Disabled
1: Bus voltage constant control
2: Decelerate to stop
F9-60
Threshold of power
dip ride-through
function disabled
80% to 100%
F9-61
0.0 to 100.0s
Threshold of power
dip ride-through
function enabled
60% to 100%
F9-63
0: Disabled
1
:
Enabled
Load lost protection
F9-64
0.0 to 100.0%
Load lost detection
level
F9-65
0.0 to 60.0s
Load lost detection
time
F9-67
0.0% to 50.0% (maximum frequency)
Overspeed detection
level
F9-69
Detection level of
speed error
0.0% to 50.0% (maximum frequency)
F9-70
Detection time of
speed error
0.0s: Not detected
0.1 to 60.0s
F9-72
Power dip ride-
through integral
coefficient Ki
0 to 100
F9-73
Deceleration time of
power dip ride-through 0 to 300
.
0
s
FA PI D F unction
Function
Code
Parameter Name
Change
Setting Range
Default
90℃
0
☆
☆
85.0%
0.50s
80.0%
10.0%
1.0s
20.0%
1.0s
20.0%
5.0s
30
20.0s
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
★
FA-01
PID digital setting
0.0% to 100.0%
0
☆
50.0%
☆
EC590
Function code table
EC590
Function code table
-
171
-
-
172
-







































































