





























-
121
-
-
122
-
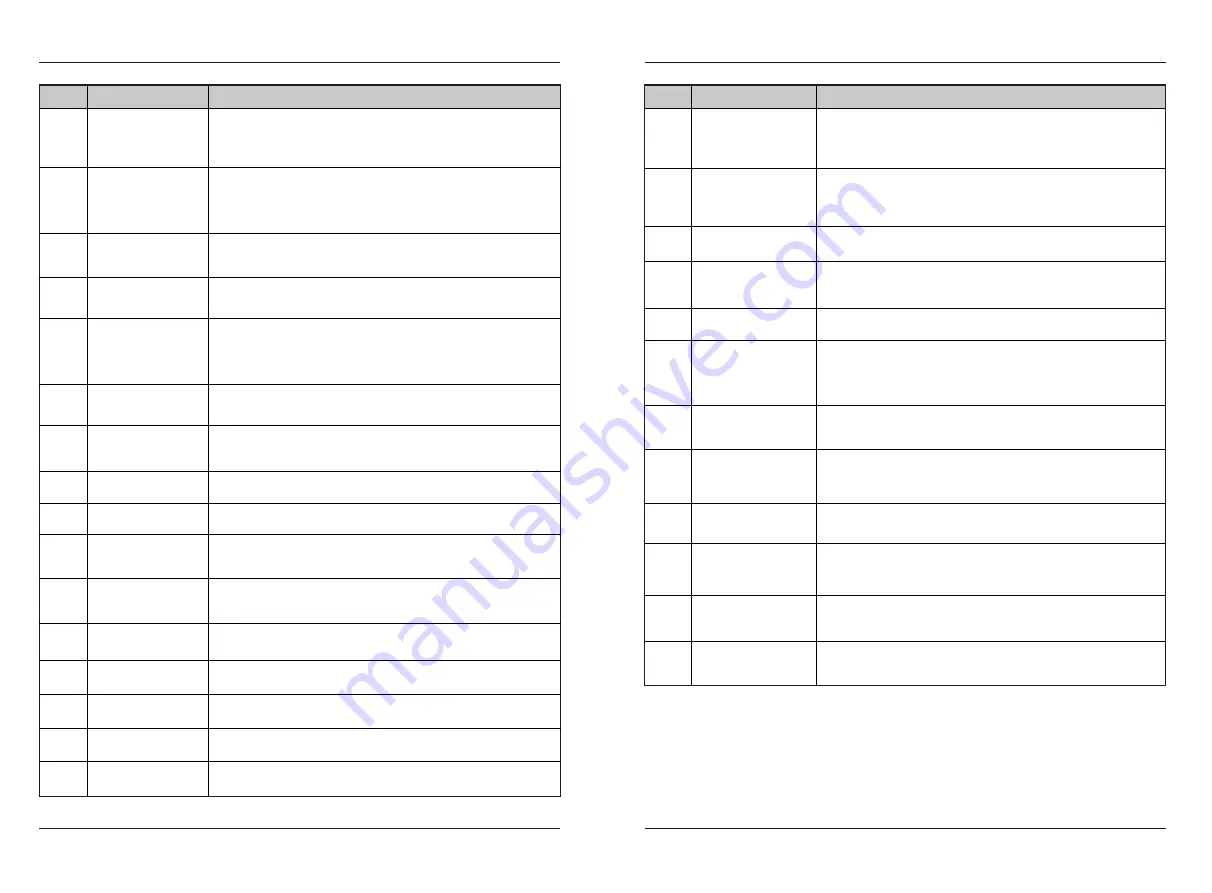
Value
Function
Description
14
Torque limited
Terminal set for this function becomes on when the AC drive enters
stall protection because output torque reaches toque limit in speed
control.
15
Ready for RUN
Terminal set for this function becomes on when the AC drive is ready
to drive motor (Power applied to main circuit and control circuit is
normal, and no fault is detected).
16
AI1 > AI2
When AI1 input is greater than AI2 input, terminal set for this
function becomes on.
17
Frequency upper limit
reached
When running frequency reaches frequency upper limit, terminal set
for this function becomes on.
18
Frequency lower limit
reached (no output at
stop)
19
Terminal set for this function becomes on when undervoltage occurs
on AC drive.
Whether terminal is active or inactive is determined by communi
-
cation address 0x2001.
20
Communication
setting
When running frequency reaches frequency lower limit, terminal set
for this function becomes on. When the AC drive is in stop status,
terminal set for this function becomes off.
Undervoltage
-
22
Reserved
21
-
Reserved
Terminal set for this function becomes on when accumulative power-
on time of the AC drive (F7-13) exceeds value set in F8-16.
24
Reserved
23
When output frequency is 0 during drive running, terminal set for this
function becomes on. When the drive stops, terminal remains on.
Zero-speed running 2
(having output at stop)
Refer to descriptions of “ F 8- 28 ” and “ F 8- 29 ”
25
Frequency level
detection 2
Refer to descriptions of “ F 8- 30 ” and “ F 8- 31 ”
26
Frequency 1
reached
Refer to descriptions of “ F 8- 32 ” and “ F 8- 33 ”
27
Frequency 2
reached
Refer to descriptions of “ F 8- 38 ” and “ F 8- 39 ”
28
Current 1 reached
Refer to descriptions of “ F 8- 40 ” and “ F 8- 41 ”
29
Current 2 reached
Value
Function
30
Timing reached
Description
On the condition that the timing function is enabled (F8-42 = 1),
terminal set for this function becomes on when current running time
of the AC drive reaches the set time.
32
Load lost
Terminal set for this function becomes on when load gets lost.
33
Reverse running
Terminal set for this function becomes on when the AC drive runs in
reverse direction.
34
Zero current
Refer to descriptions of “ F 8 - 3 4 ” and “ F 8 - 3 5 ” .
35
IGBT temperature
reached
Terminal set for this function becomes on when heatsink temperature
of AC Drive IGBT (F7-07) reaches IGBT temperature threshold
(F8-47).
37
Frequency lower limit
reached (having output
at stop)
38
Alarm output
39
Motor overheat
pending
40
Current running time
reached
Terminal set for this function becomes on when current running time
of the AC drive exceeds value set in F8-53.
41
Fault output
31
Ai1 input exceeding
limit
Terminal set for this function becomes on when AI1 input is larger
than value set in F8-46 (AI1 input voltage upper limit) or smaller
than value set in F8-45 (AI1 input voltage lower limit).
The terminal set for this function becomes on when the running
frequency reaches the frequency lower limit. When the drive stops,
the terminal remains on.
If a fault occurs on the AC drive and the AC drive continues to run,
terminal set for this function outputs an alarm signal.
Terminal set for this function becomes on when motor temperature
reaches value set in F9-58 (Motor overheat pending threshold). You
can view motor temperature by using U0-34.
When a fault occurs on the AC drive (except undervoltage), terminal
set for this function becomes on.
36
Output current
exceeding limit
Refer to descriptions of “ F 8 - 3 6 ” and “ F 8 - 3 7 ” .
EC590
Function parameters description
EC590
Function parameters description







































































