





























-
109
-
-
110
-
Keep the same setting of this
parameter for the master and
slave.
F0-18
Deceleration time 1
0.0 to 6500.0s
For slave in speed control, perform the following settings. Note that only setting of F8-15 can be
modified.
Function Code
Parameter Name
Setting
FD-00
Baud rate
Setting Range
Keep the same setting of
thousands position of this
parameter for the master
and slave.
0000 to 6039
A8-00
Point-point communication
0: Disabled
1: Enabled
A8-01
Master or slave selection
0: Master
1: Slave
A8-02
Selection of action of the
slave in point-point com
-
munication
000 to 111
0: No
1: Yes
BIT0
:
whether to follow
master's command
BIT1
:
whether to send
fault information to
master when a fault occurs
BIT2
:
whether to alarm
when it becomes off-line
1
1
011
A8-03
The slave received data
0: Output frequency
1: Frequency reference
F0-02
Command source selection
0: Operating panel control
(keypad & display)
1: Terminal I/O control
2: Serial comms.
0
2
F0-03
Main frequency reference
setting channel selection
0: Digital setting
(non-retentive at power
down)
1: Digital setting (retentive
at power down)
2: AI1
3: AI2
4: Keyboard pointer
9
9
F0-10
Max. Frequency
5.00 to 500.00 Hz
F0-17
Acceleration time 1
0.0 to 6500.0s
50.00 Hz
Keep the same setting of this
parameter for the master and
slave.
Keep the same setting of this
parameter for the master and
slave.
F0-03
Main frequency reference
setting channel selection
5: Pulse reference
6: Multi-reference
7: Simple PLC
8: PID reference
9: Serial comms.
F0-18
Deceleration time 1
0.0 to 6500.0s
F8-15
Droop rate
0.00 to 10.00 Hz
1.00 Hz
A0-00
Speed/Torque control
selection
0: Speed control
1: Torque control
0
Keep the same setting of this
parameter for the master and
slave.
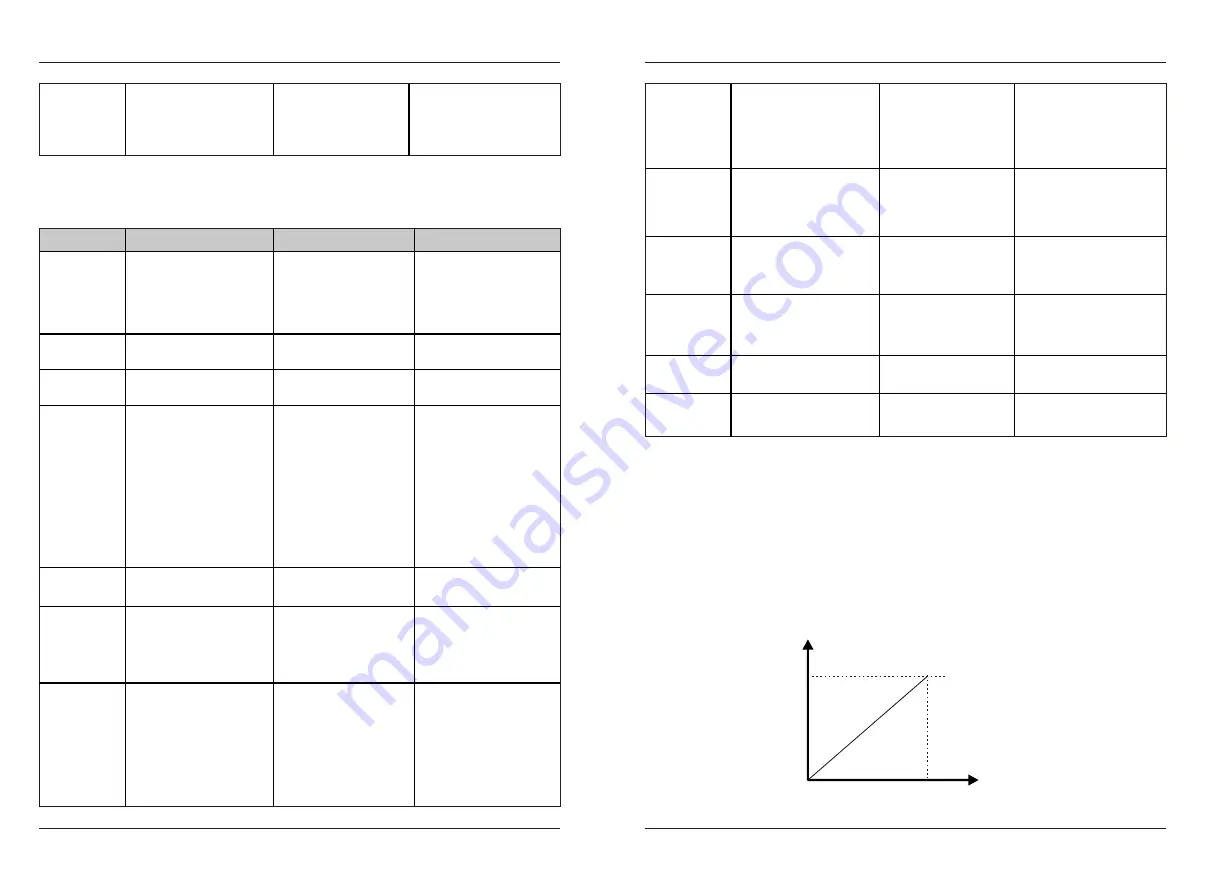
Droop Control
The droop control function aims at balancing the load level of two motors that drive the same
load. This function is required only when both master and slave are in speed control.
A proper droop rate is gradually obtained during drive running. Therefore, do not set F8-15 to a
very large value. Otherwise, steady speed will decline obviously when load is very large. You must
set this parameter in both master and slave.
Figure 5-27 Relationship between droop rate and output torque
Droop rate
(
Hz
)
Output
torque (%)
100%
0
EC590
Function parameters description
EC590
Function parameters description







































































